






ReachBot, lo studio per una missione robotica in una caverna marziana
NASA ha dato il via alla prima fase di sviluppo di un robot ad alta mobilità e dotato di bracci estensibili per l’esplorazione delle caverne marziane

NASA ha dato il via alla prima fase di sviluppo di un robot ad alta mobilità e dotato di bracci estensibili per l’esplorazione delle caverne marziane
Grande e inaspettato successo di partecipazione per la richiesta di aiuto da parte dell’agenzia spaziale statunitense a progettare il prossimo rover meccanico per l’esplorazione di Venere.

Il Jet Propulsion Laboratory (JPL) di Pasadena in California, sotto l’egida del programma NASA Innovative Advanced Concepts, ha aperto un bando pubblico per sviluppare un sensore meccanico per la rilevazione di ostacoli, da installare sul futuro rover per l’esplorazione di Venere.

Fin dagli anni ’70 del secolo scorso, gli ingegneri hanno iniziato a pensare alla costruzione di grandi strutture nello spazio e a come rendere questi processi veloci, sicuri ed economici.

La velocità di un rover su terreni sconnessi dev’essere sempre tenuta sotto controllo. La stessa tecnologia viene usata per monitorare la temperatura di erogazione del caffè.
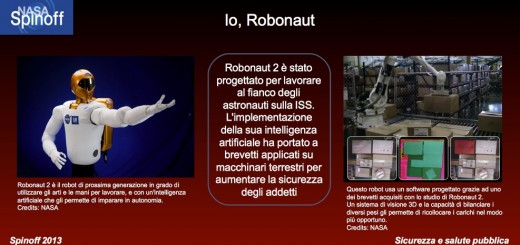
Salve a tutti, mi chiamo Robonaut. Robonaut 2, per la precisione. Probabilmente alcuni di voi mi conoscono già perché ora lavoro sulla Stazione Spaziale su cui sono arrivato con lo Space Shuttle Discovery nel 2011. Ma...

SpaceHumor – Scenario Post Apocalittico
1 Agosto 2014