






NASA cerca aiuto per progettare il futuro rover meccanico venusiano

Il Jet Propulsion Laboratory (JPL) di Pasadena, in California, sotto l’egida del programma NASA Innovative Advanced Concepts, ha aperto un bando pubblico per sviluppare un sensore meccanico per la rilevazione di ostacoli da installare sul futuro rover per l’esplorazione di Venere.
Con le sue nubi di acido solforico, temperature di oltre 450 °C e pressione atmosferica 92 volte superiore a quella terrestre, Venere si presenta come un pianeta molto ostile da esplorare. Solo una dozzina di sonde, per lo più sovietiche, sono riuscite a raggiungere la superficie tra il 1967 e il 1985, rimanendo attive al massimo per poco più di 2 ore (la sonda era Venera 13, nel 1982) prima che l’elettronica di bordo soccombesse alle difficili condizioni ambientali.

Dagli anni ’90 sono stati studiati diversi sistemi per affrontare una nuova missione, quali protezioni avanzate, circuiti di raffreddamento alimentati da un generatore termoelettrico a radioisotopi (RTG) o realizzazione di componenti elettronici resistenti alle alte temperature, ma tutti si sono dimostrati eccessivamente costosi o comunque resistenti al massimo per un giorno.
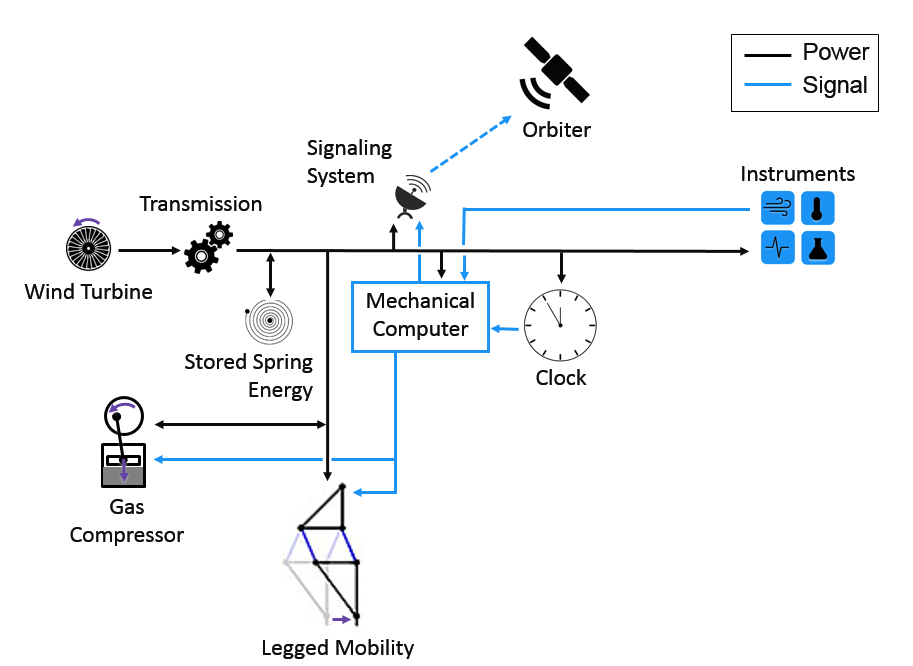
Per affrontare una missione robotica di esplorazione della durata di alcuni mesi, necessaria per compiere gli esperimenti previsti e ammortizzare l’investimento, il JPL ha quindi abbandonato il classico modello di rover supertecnologico per fare un passo indietro verso un rover completamente meccanico alimentato da una turbina eolica. La velocità media del vento su Venere è compresa tra 0,3 e 1,3 m/s, ma considerando l’elevata pressione atmosferica, questa velocità è paragonabile a una burrasca terrestre.
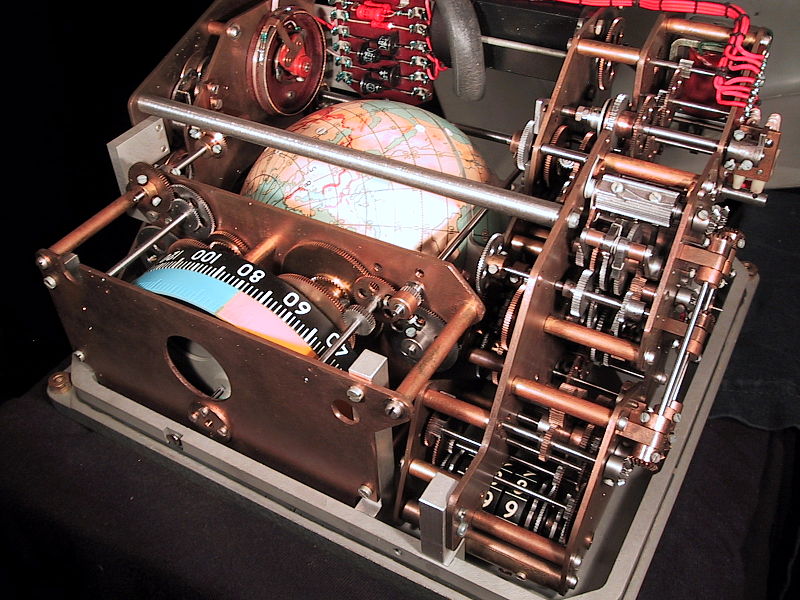
Circa 2300 anni fa i Greci costruirono il famoso “meccanismo di Antikythera“, un computer meccanico a ruote dentate che serviva per calcolare il sorgere del sole, le fasi lunari, i movimenti dei cinque pianeti conosciuti, gli equinozi, i mesi, i giorni della settimana e le date dei giochi olimpici. In seguito, dal medioevo in poi, gli automatismi meccanici sono stati abbondantemente utilizzati come orologi, calendari, calcolatori o per intrattenimento, cadendo però sempre più nell’oblio con l’avanzare della tecnologia elettronica.
Il bando “Exploring Hell: Avoiding Obstacles on a Clockwork Rover”
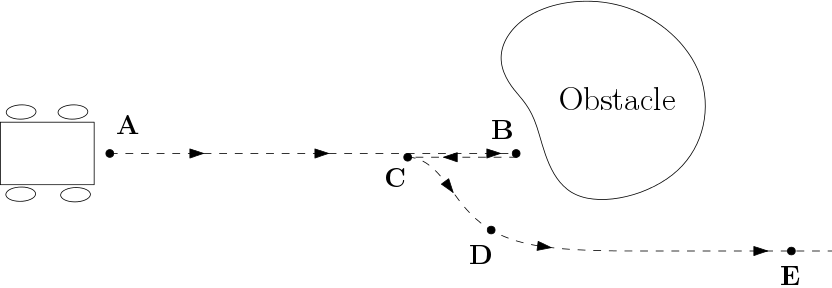
Mentre il rover AREE (Automaton Rover for Extreme Environments) esplorerà la superficie venusiana, raccogliendo campioni e inviando dati alla sonda madre rimasta in orbita, dovrà individuare e aggirare gli ostacoli che si presenteranno sul suo percorso, quali rocce, fossi e terreni inclinati. Per questo avrà bisogno di un sistema di rilevamento che non si basa su delicati sistemi elettronici, ma di un robusto, sicuro, preciso e affidabile rilevatore meccanico. Per questo compito il JPL ha voluto rivolgersi all’estesa comunità di inventori e innovatori, senza nessuna limitazione di preparazione tecnica. Possono partecipare singole persone (età minima 18 anni) o team, di qualsiasi nazionalità.
I partecipanti dovranno presentare un sensore/attuatore completamente meccanico che possa essere incorporato nell’attuale modello AREE, senza però la necessità di dover dimostrare come incorporarlo, rispettando alcuni criteri:
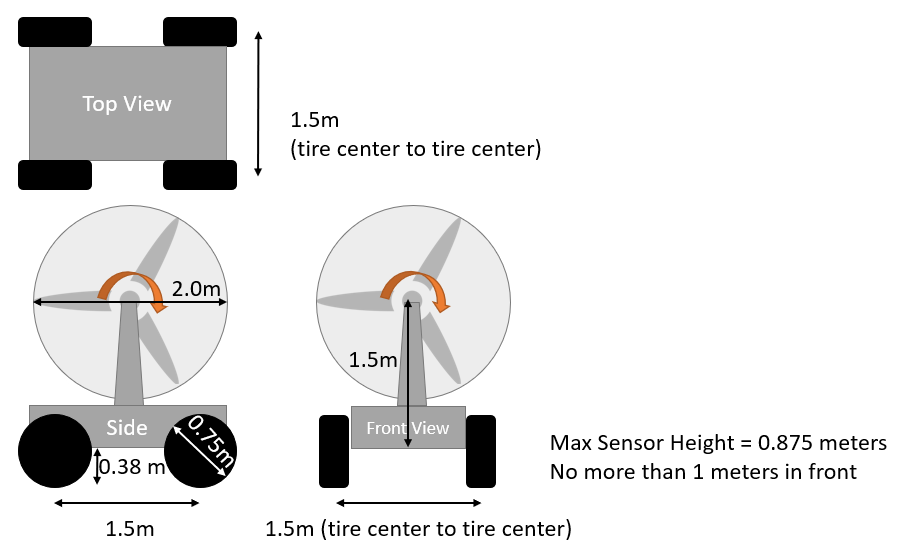
- il sensore non deve estendersi per oltre 1 m dal corpo del rover;
- la sua altezza è limitata a 87,5 cm dalla superficie;
- non deve avere massa superiore a 25 kg.
Il sensore deve essere in grado di rilevare:
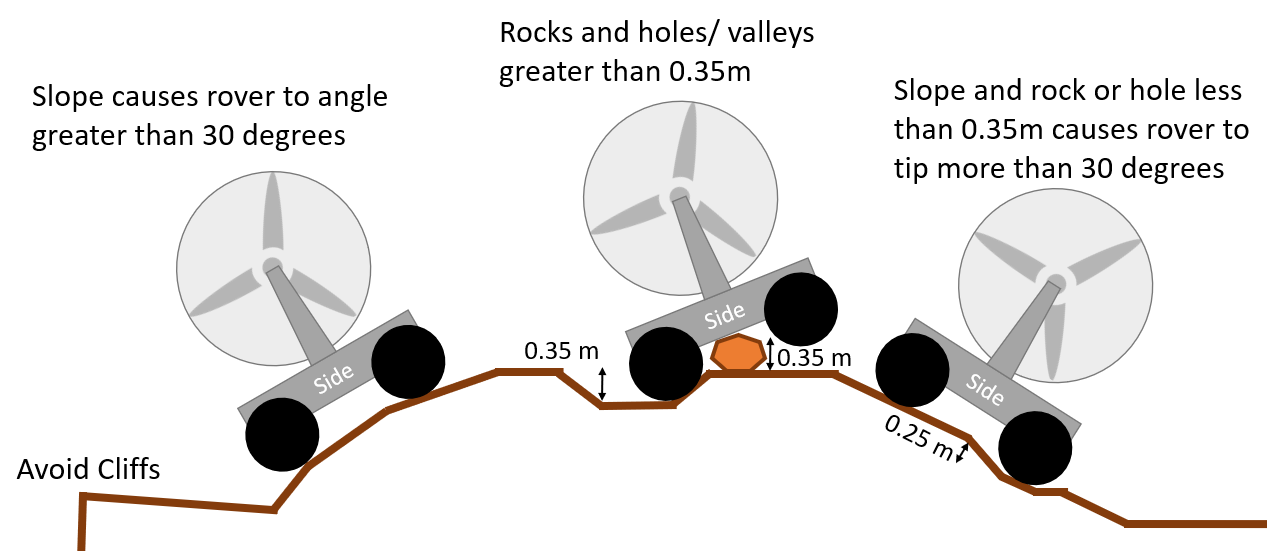
- salite e discese superiori a 30° di inclinazione;
- rocce alte più di 35 cm, ma non attivare l’attuatore per rocce più basse di 30 cm;
- buche e fossi profondi più di 35 cm, di qualsiasi larghezza, ma non attivare l’attuatore per profondità fino a 30 cm;
- ignorare buche e fossi di larghezza fino a 10 cm e rilevare quelle più ampie di 10 cm e superiori a 35 cm di profondità.
L’attuatore, dopo la rilevazione dell’ostacolo, dovrà essere in grado di muovere di almeno 3 cm un braccetto di 6 cm di diametro, applicando una forza di 25 N. Questa funzione servirà a ingranare la retromarcia del rover per aggirare l’ostacolo.
Inoltre il sensore/attuatore deve avere una vita operativa di almeno 6 mesi. Alcuni componenti elettrici base, quali cavi, resistori e induttori sono ammessi nel progetto, mentre condensatori, microchips e diodi no.
L’energia elettrica prodotta dalla pala eolica dedicata al sensore/attuatore sarà di 1 W, con la possibilità di salire a 15 W in limitati e giustificati casi.
Le proposte verranno scrutinate dai tecnici del JPL che, seguendo una tabella di valutazione, assegneranno un punteggio percentuale. Il montepremi, oltre all’onore di vedere la propria proposta eventualmente volare verso Venere, è di 30.000 $, di cui 15.000 al primo, 10.000 al secondo e 5.000 al terzo classificato.
Il bando è stato aperto lo scorso 18 febbraio e i progetti potranno essere proposti fino al 29 maggio prossimo.
La fase di valutazione inizierà il 1º giugno per concludersi al massimo il 2 luglio e i vincitori verranno annunciati il 6 luglio.
In questa pagina tutte le indicazioni per partecipare.
Fonte e foto credit: NASA, JPL.
 Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Mi ricordo di una simpatica e semplice macchinina elettrica che avevo da bambino con un sistema meccanico che le faceva riconoscere il bordo del tavolo, fare retromarcia e ripartire…se la ritrovo (utopia) la mando alla NASA, visto mai… =;-)
Progetto particolare! interessante!