






InSight: nuovi tentativi per salvare la sonda HP³

Se è vero che gli ingegneri amano risolvere problemi, specialmente quelli più sfidanti, i tecnici della missione InSight hanno ancora ottime opportunità per soddisfare la proprie inclinazioni professionali. A dieci mesi dall’atterraggio, le difficoltà dello strumento che doveva studiare le caratteristiche termiche del sottosuolo di Marte, la sonda Heat Flow and Physical Properties Probe, o HP³, sono ben lontane dall’essere superate.
Come i lettori di AstronautiNEWS ben sanno, la sonda termica è stata deposta sulla superficie del Pianeta Rosso dal braccio robotico lo scorso 12 febbraio. Il penetratore meccanico di cui è dotata (la cosidetta “talpa”) avrebbe dovuto raggiungere la profondità di cinque metri in una quaratina di giorni marziani ma, dopo pochi minuti di scavo, ad appena 35 centimetri dalla superficie, si è arrestato, iniziando a rimbalzare in modo imprevisto.
Essendo molto improbabile la presenza di un corpo roccioso disposto perpendicolarmente rispetto alla direzione dello scavo (la zona di atterraggio di InSight è relativamente priva di rocce e la “talpa” è in grado di aggirare la maggior parte degli ostacoli, scivolando lateralmente sulla loro superficie), i tecnici e gli scienziati della missione hanno iniziato a pensare che la discesa della sonda termica sia ostacolata da uno spesso strato di duricrust, sabbia marziana “cementata” da particolari reazioni chimiche, che presenta una densità disomogenea, con grumi e zone cave. Invece di cedere e franare attorno al penetratore, come avrebbe fatto una normale regolite, questo terreno si è compattato ad ogni urto, creando una cavità attorno alla “talpa” e privandola dell’attrito necessario allo scavo.
Il fallimento del primo tentativo
Dopo una lunga fase di studio, la prima azione “azzardata” e totalmente fuori programma che il team di InSight ha concepito per risolvere il problema è stata la rimozione della struttura di supporto, che sorreggeva in verticale il penetratore durante la fase iniziale dello scavo e che custodisce il “cavo scientifico” con i sensori di temperatura, ancora in attesa di essere immerso nel terreno. L’operazione è stata compiuta con successo nel giugno scorso e ha permesso di confermare visivamente, attraverso le immagini riprese dalla camera IDC, l’ipotesi sulla posizione della “talpa”, in precedenza quasi del tutto nascosta dalla struttura.
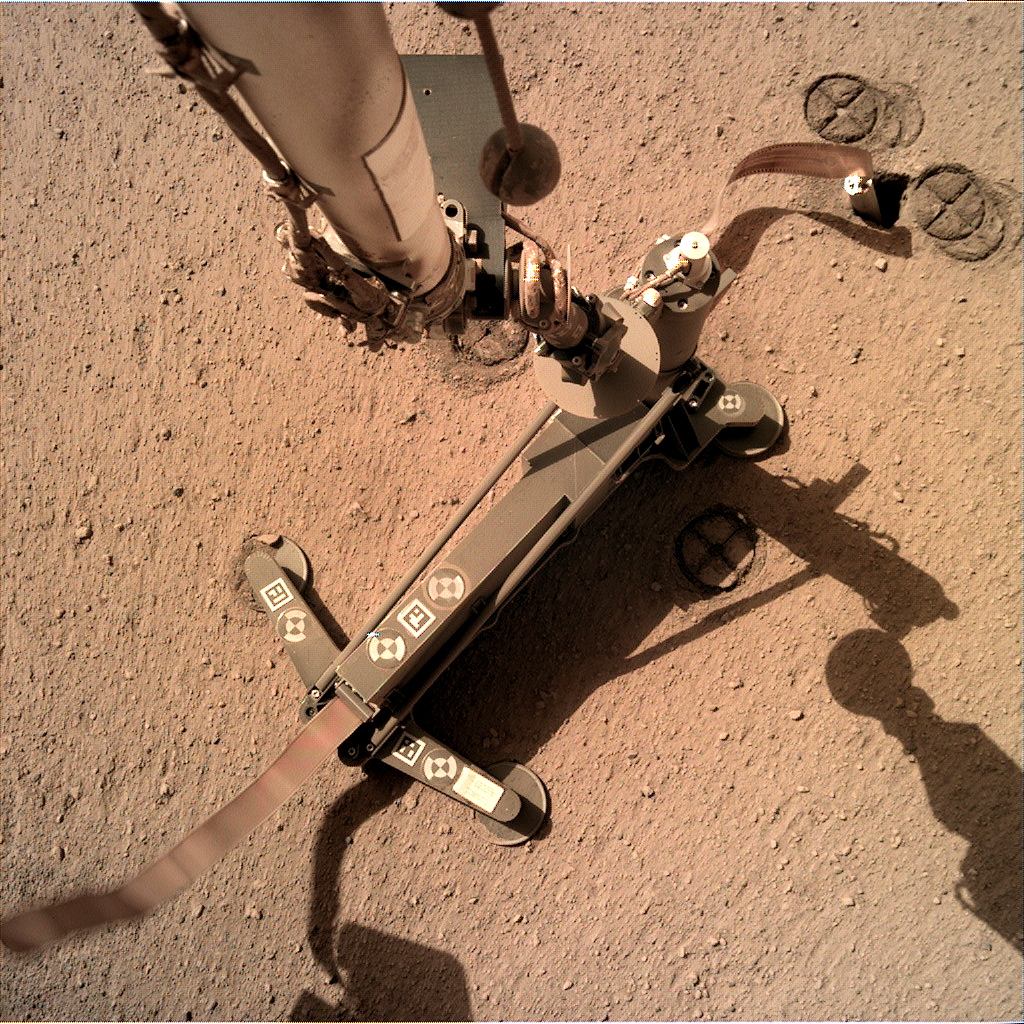
La seconda mossa in vista del superamento dell’impasse è stata l’utilizzo della pala di cui il braccio robotico è fornito per creare una pressione sul terreno in prossimità del penetratore, in modo da rompere il duricrust e far collassare la regolite all’interno del foro prodotto dalla “talpa”. Quest’ultima avrebbe così riacquistato l’attrito laterale necessario per procedere nello scavo senza rinculare.
L’operazione è stata compiuta in tre fasi, a partire dal 31 luglio (Sol 240). Inizialmente la pala è stata usata “di piatto”, premendo sull’area posta (dal punto di vista delle camere di bordo) immediatamente a destra del foro creato dal penetratore. Sono seguite quattro azioni “di punta” e, infine, il 13 agosto (Sol 253), ancora un tocco con l’intera superficie dell’attrezzo, che misura 65 cm². Il braccio, ha spiegato sul blog della missione Tilman Spohn, Principal Investigator di HP³, può esercitare una forza di 50 newton; la pressione ottenuta con l’intera superficie della pala è perciò di 10 kPa, mentre quella della lama raggiunge i 300 kPa.
I risultati di questi tentativi non sono stati soddisfacenti. La regolite non è collassata come sperato e si è ottenuto solo un parziale riempimento della cavità formatasi attorno alla “talpa”: troppo poco per aumentarne l’attrito. Se non del tutto fallimentare, la procedura si è rivelata decisamente troppo lenta.
Una nuova chance per la “talpa”
Dal 28 agosto al 7 settembre la congiunzione solare (ossia il fenomeno, che si verifica ogni due anni, per cui Marte, muovendo lungo la sua orbita, si nasconde dietro al Sole, rendendo impossibili o disturbate, per alcuni giorni, le comunicazioni tra le sonde e la Terra) ha costretto i tecnici di InSight a interrompere sia la trasmissione dei comandi, sia la ricezione delle immagini e degli altri dati scientifici, lasciando loro il tempo per elaborare nuove e fatalmente più azzardate strategie.
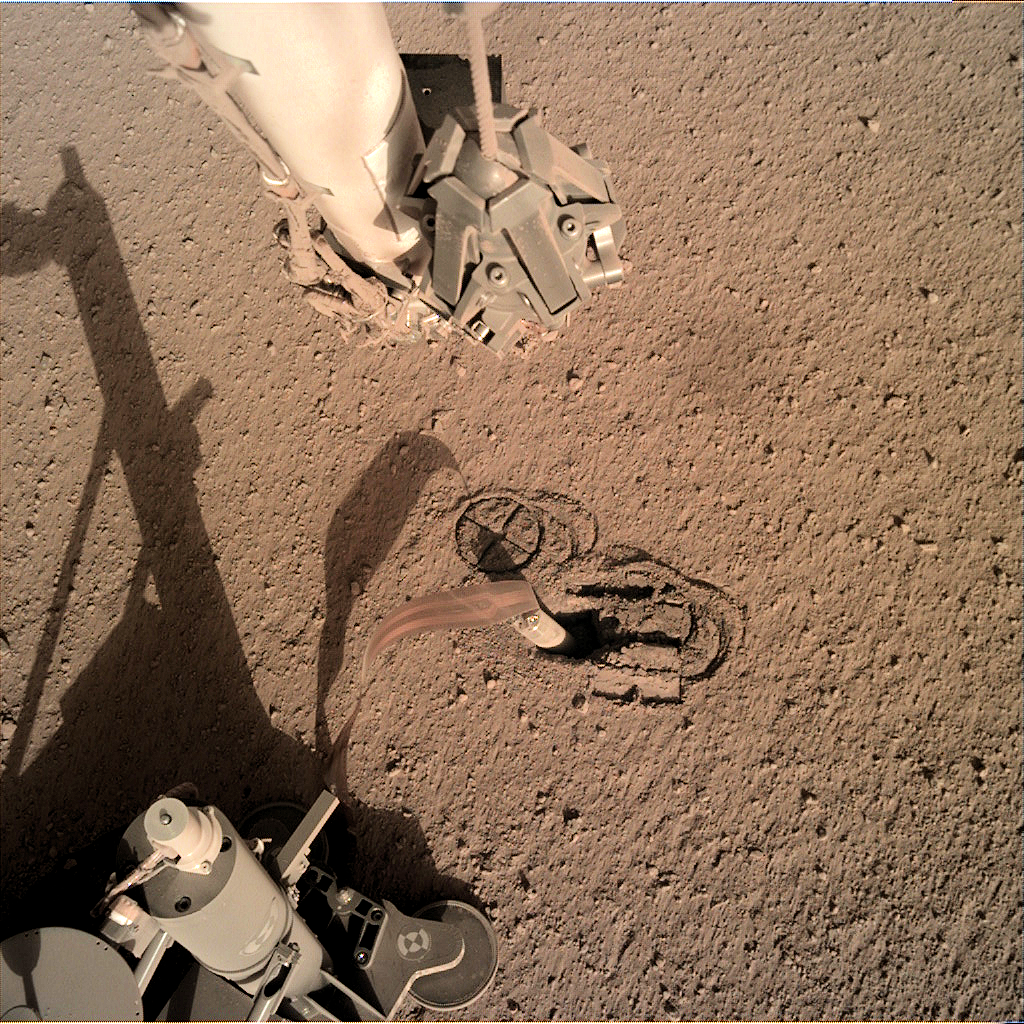
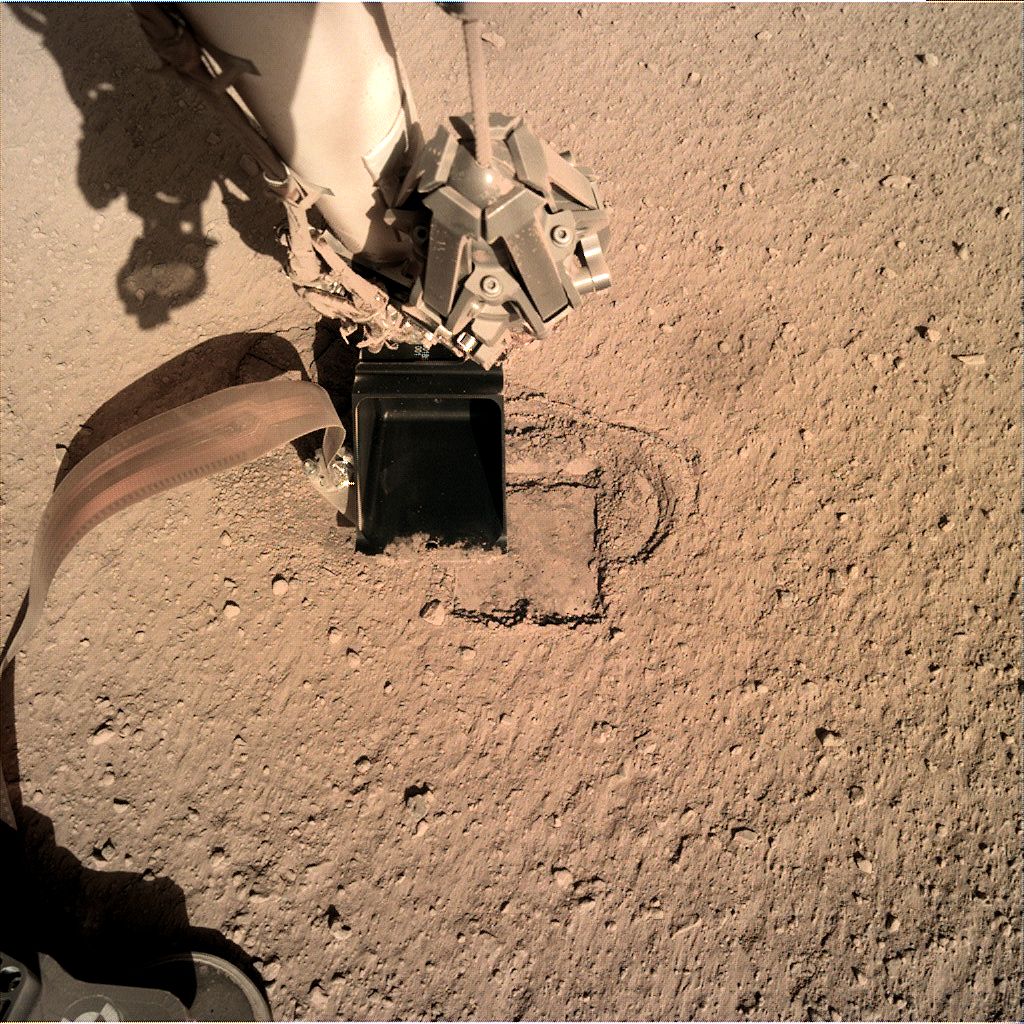
Finora, per sicurezza, si è evitato di portare il braccio robotico a diretto contatto con la sonda HP³ o con il “cavo scientifico”, ma il prossimo tentativo sarà meno conservativo. «Tenteremo di premere con il lato della pala contro la “talpa”, in modo da bloccarla contro la parete del suo foro», ha rivelato Sue Smrekar del Jet Propulsion Laboratory, Deputy Principal Investigator di InSight. «Ciò potrebbe aumentare l’attrito quanto basta per farla avanzare quando riprenderà a scavare».
La soluzione risulta evidente nelle immagini riprese da IDC il 3 ottobre (Sol 302), che mostrano la pala già a diretto contatto con la parte del penetratore che sporge dal terreno.
Oltre a ciò, per avere maggiore attrito non si esclude di utilizzare la punta della pala per “spazzare” la regolite nel foro, in modo da riempirlo, e poi compattare il materiale usando il fondo dello strumento, prima di tornare a stringere lateralmente la “talpa”.
Basterebbe che…
Chi ha seguito da spettatore le vicende di InSight e le disavventure di HP³, difficilmente potrà evitare un certo senso di frustrazione nel vedere i tecnici del JPL di NASA, responsabile dell’intera missione, e dell’agenzia spaziale tedesca DLR, che ha fornito la sonda termica, prendere via via decisioni che appaiono lente, eccessivamente prudenti e forse addirittura incoerenti. Dalla poltrona del proprio salotto non sembra difficile immaginare che cosa si dovrebbe fare per risolvere il problema: perché non usano il braccio robotico per spostare la talpa in un altro punto? Perché non hanno pensato subito ad usare la pala per riempire il foro? Perché non spingono direttamente il penetratore nel terreno?
Porre domande di questo genere, tuttavia, significa sottostimare, se non addirittura ignorare, i pesanti vincoli, tecnici e di budget, con cui chi progetta e gestisce una missione di esplorazione robotica interplanetaria deve fare i conti.
A chi si limita a guardare le foto che arrivano da InSight può sembrare che basterebbe “allungare una mano” per risolvere tutti i problemi, ma i tecnici che lavorano sulla sonda che si trova a centinaia di milioni di chilometri dalla Terra sanno bene che per ogni piccolo movimento del braccio robotico devono inviare un comando, riprendere un’immagine di quanto avvenuto, attenderne la ricezione attraverso uno dei satelliti di relay in orbita marziana, quindi analizzare i risultati.
Il processo, che già è estremamente lento per le operazioni per cui il braccio è disegnato, si complica quando lo si vuole utilizzare per funzioni nuove. Il braccio ha una manipolatore, ma può sollevare solo gli oggetti già predisposti con una particolare “maniglia”. Ciò esclude che possa essere impiegato per afferrare o riposizionare la “talpa”. L’altro attrezzo di cui dispone, anche se ha la forma di una benna, non è stato pensato per scavare il terreno, ma semplicemente per spostare e allontanare detriti o altri piccoli ostacoli al momento del dispiegamento degli strumenti sul suolo davanti a InSight.
In apparenza, ha osservato Sue Smrekar, usare la pala per riempire il foro della sonda poteva sembrare ovvio e assai più semplice che non impiegarla per fare pressione, «tuttavia è molto impegnativo, perché quando abbiamo posizionato la struttura di supporto [di HP³] sul terreno, il nostro obiettivo era quello di metterla il più lontano possibile dal lander», per evitarne gli effetti termici. «Perciò ora, per il braccio, andare oltre il foro e scavare, è super-impegnativo», dal momento che il penetratore si trova ai limiti della sua zona di azione.
Ma anche esercitare la pressione sul suolo per far cedere il duricrust è stato difficile. A quella distanza, infatti, il braccio non poteva utilizzare la forza che sarebbe stata disponibile se la “talpa” fosse stata più vicina. Come ha riconosciuto Ashitey Trebi-Ollennu del JPL, l’ingegnere responsabile del braccio robotico, «stiamo chiedendo al braccio di esercitare una forza superiore al suo peso. Il braccio non può premere il suolo come una persona. Tutto sarebbe più facile se ne fosse in grado», ma non è il nostro caso.
Anche al team di InSight è balenata l’idea di usare il braccio per spingere la “talpa” nel terreno. Ma per il momento la soluzione appare loro come l’ultima spiaggia, da adottarsi solo in mancanza di alternative. In primo luogo, come ha fatto notare la Smrekar, sarebbe necessario fare pressione sul “cavo scientifico”, proprio là dove è connesso al penetratore; è difficile riuscire a compiere questa operazione senza rischiare di danneggiarlo. E poi, come riuscire a dosare la forza di pressione? «Il braccio non è stato progettato per essere estremamente preciso. E non è mai stato progettato per spingere contro nulla». In effetti, a rigore, non gli si può comandare di spingere, ma solo di stare in una certa posizione per un dato tempo. Se lo si posiziona in modo da esercitare una pressione sulla talpa e la cosa ha successo, l’effetto può durare solo per alcuni colpi. Infatti se il penetratore avanza un poco, il braccio non può seguirlo in modo automatico, in modo da mantenere invariata la sua azione, ma deve essere via via riposizionato.
C’è poi un ulteriore limite con cui secondo la Deputy Principal Investigator occorre fare i conti: «l’uso del braccio richiede energia e man mano che la stagione avanza, abbiamo meno energia solare disponibile. A un certo punto, potremmo arrivare alla situazione in cui l’utilizzo del braccio influirà sulla nostra capacità di acquisire dati sismici», cioè metterà a rischio il corretto funzionamento dell’altro principale strumento di InSight, il sismometro SEIS.
Anche se presso il pubblico i suoi risultati rischiano di essere oscurati dalle difficoltà di HP³, il Seismic Experiment for Interior Structure sta operando con successo, fornendo agli scienziati nuovi dati per la comprensione della struttura interna del Pianeta Rosso; ovviamente il suo lavoro non potrà essere compromesso per fornire energia ai tentativi di salvataggio della “talpa”.
Tali sforzi perciò non potranno proseguire senza limiti: «non vogliamo affrettarci e fare qualcosa che danneggi la “talpa” o le impedisca definitivamente di penetrare nel suolo», ha concluso la Smrekar. «Ma allo stesso tempo, non potremo continuare a farlo per sempre».
 Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

Grazie per l’aggiornamento:
Ottimo articolo!