






A Spinoff a Day – Io, Robonaut
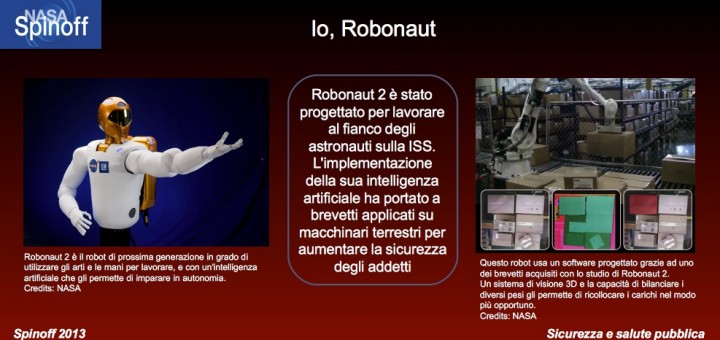
Salve a tutti, mi chiamo Robonaut. Robonaut 2, per la precisione. Probabilmente alcuni di voi mi conoscono già perché ora lavoro sulla Stazione Spaziale su cui sono arrivato con lo Space Shuttle Discovery nel 2011. Ma chi sono, da dove vengo, e che cosa posso portare di buono sulla Terra?
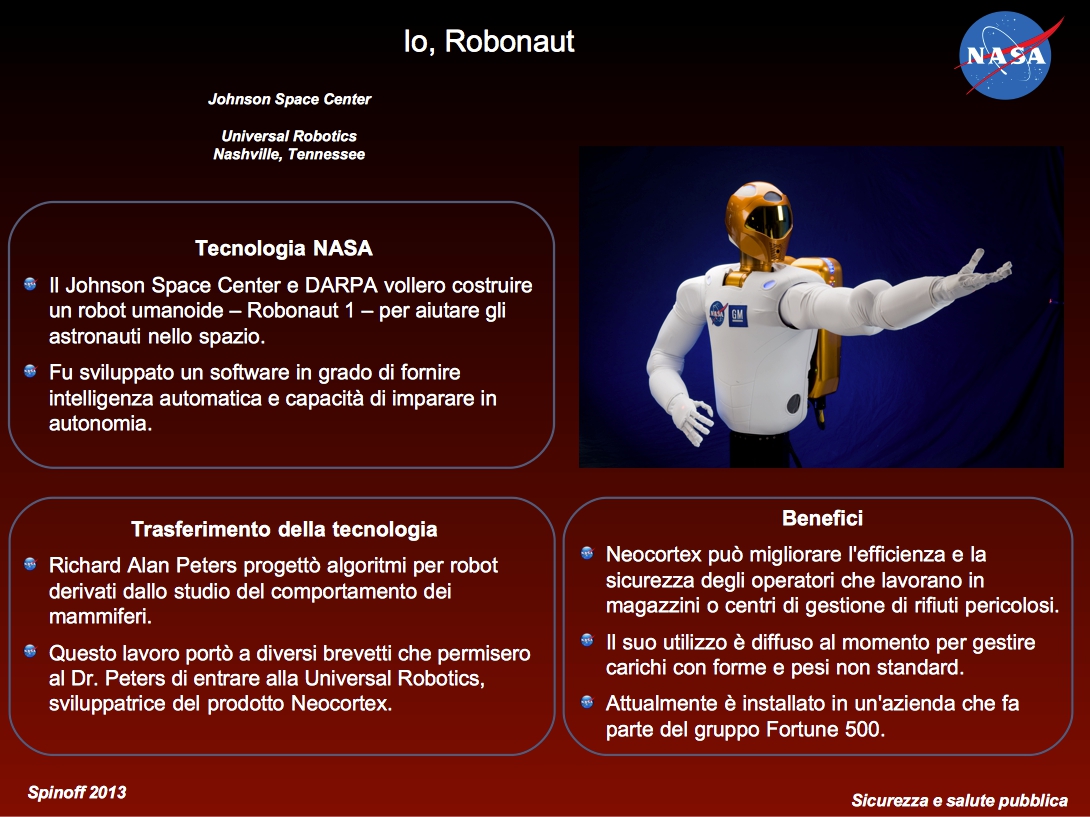
Alla fine degli anni ’90 la ricerca nel campo robotico (almeno per quanto riguarda NASA) era focalizzata nel trovare il modo migliore di far deambulare i miei cugini rover su terreni avversi, evitando gli ostacoli e prolungando il più possibile la vita utile dei componenti. Come afferma Robert Ambrose, “non si era ancora pensato di dotare un robot di braccia e mani per interagire con il mondo”. Robert Ambrose è un ingegnere robotico del Johnson Space Center, e fu colui al quale venne l’idea di costruire un primo prototipo di “me”, Robonaut 1, per aiutare gli astronauti nei loro compiti giornalieri.
Secondo la sua idea il robot avrebbe dovuto poter interagire con gli attrezzi persenti sulla ISS, che però sono progettati per gli esseri umani, e avrebbe anche dovuto essere in grado di reagire a cambiamenti imprevisti delle situazioni (come ad esempio ritardi o interruzioni nelle comunicazioni con il controllo missione).
Nel 2001, quindi, il team del Johnson iniziò a cercare un software adatto a Robonaut 1, qualcosa che potesse metterlo in grado di apprendere da solo il mondo circostante. Le precedenti generazioni di intelligenza artificiale richiedevano la programmazione di regole per far agire i robot, e la catalogazione di tutti gli oggetti all’interno di un ambiente per farli riconoscere alla macchina, ma ora era giunto il tempo di farci imparare in autonomia, metterci in grado di percepire un nuovo oggetto, determinarne le caratteristiche e utilizzarlo al meglio.
Una delle idee migliori in questo senso arrivò dal Dr. Richard Alan Peters dell’Università di Vanderbilt, un professore che stava studiando l’approccio dei mammiferi alla conoscenza. Egli voleva scrivere un programma ad hoc che imitasse il modo in cui i mammiferi usano i loro sensi per capire l’ambiente circostante e prendere decisioni. Trovò alcuni pattern comuni negli animali e li incorporò in algoritmi di apprendimento utilizzabili da un robot, proprio Robonaut 1, che dunque gettò le basi per la seconda generazione, di cui io faccio parte.
Da questi studi sono nati numerosi brevetti relativi all’intelligenza artificiale ed ora il Dr. Peters, amministratore delegato della Universal Robotics, ha reso disponibile sul mercato un prodotto derivante da questa tecnologia: il Neocortex.
Neocortex imita il metodo di acquisizione della conoscenza da parte delle persone, perché fornisce una visione d’insieme dei dati e dei processi acquisiti attraverso i sensi. Ovviamente noi robot non siamo dotati di veri e propri sensi, ma abbiamo telecamere o laser che ci permettono di vedere ed altre periferiche con le quali possiamo udire o toccare. Spatial Vision, ad esempio, è un insieme di sensori che imita la vista, mentre Autonomy può essere paragonato alla muscolatura che fornisce a Neocortex capacità di effettuare movimenti anche complessi.
Le applicazioni delle macchine su cui è installato Neocortex sono svariate: nei magazzini possono venire impiegati come muletti autonomi, ma con la capacità aggiuntiva di analizzare fattori quali la forma, il peso, l’orientamento dell’oggetto e calcolare il bilanciamento del carico in corso d’opera. Questi robot possono anche semplicemente aiutare l’addetto a leggere più velocemente i codici a barre e capire su quale scaffale andrà posizionato un determinato prodotto. Universal Robotics, però, ne prevede l’utilizzo soprattutto in ambienti in cui si deve migliorare la sicurezza dei lavoratori, come ad esempio nelle miniere o nella gestione dei rifiuti tossici, ma se pensiamo che la peculiarità di Neocortex è quella di imparare mano a mano che interagisce con l’ambiente, è facile immaginarne le potenzialità. Una su tutte l’analisi dei dati degli elettrocardiogrammi per prevedere un pattern standard in pazienti che hanno subito attacchi di cuore.
La tecnologia studiata per Robonaut ha trovato applicazioni che rendono meno pericoloso il lavoro degli operatori in molte realtà industriali e non © NASA / Veronica Remondini
Per approfondire:
Spinoff nel dettaglio [ENG]
Il sito di Robonaut [ENG]
Neocortex di Universal Robotics [ENG]
Presentazione completa in pdf originale in inglese, traduzione italiana a cura di Veronica Remondini.
 Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
