






L’India chiude il 2024 con la missione SpaDeX/POEM-4

Questa importante missione dell’Agenzia spaziale indiana ISRO, è partita oggi 30 dicembre alle 17:30 italiane dalla prima rampa di lancio dello Satish Dharwan Space Centre, situato sull’isola di Sriharikota, nella costa orientale dello stato dell’Andhra Pradesh, ad una centinaio di chilometri a nord di Chennai. Il duplice carico utile è composto dai due satelliti dimostratori SpaDeX e dalla piattaforma POEM-4 che trasporta 24 fra esperimenti scientifici e tecnologici.
Durante la conferenza stampa seguita al lancio, il presidente dell’ISRO Dr. S. Somanath ha dichiarato che il lancio è avvenuto con successo e che i due satelliti sono stati collocati su di un’orbita circolare di 475 km con un’inclinazione di 55°, come previsto e che entrambi i satelliti hanno correttamente dispiegato i propri pannelli fotovoltaici. Inoltre, se tutto proseguirà come programmato, la manovra di attracco fra i due dimostratori tecnologici dovrebbe avvenire il 7 gennaio 2025.
Nelle prossime ore il quarto stadio del vettore verrà riacceso per collocare sull’opportuna orbita il modulo POEM-4.

La missione SpaDeX (Space Docking Experiment – Esperimento di Aggancio Spaziale) è una missione di dimostrazione tecnologica relativa alle operazioni di aggancio di due piccoli mezzi spaziali, lanciati da un razzo PSLV-CA. Questa tecnologia è fondamentale per le future missioni indiane; per quelle lunari, per quelle abitate e per quelle che mirano a riportare campioni selenici sulla Terra, e anche che per quelle legate alla costruzione della stazione orbitale indiana BAS, Bharatiya Antariksha Station (che appunto significa Stazione Spaziale Indiana).
La tecnologia di aggancio nello spazio è essenziale quando avvengono dei lanci multipli di razzi per un’unica missione spaziale. Tramite SpaDeX, l’India intende proseguire nel suo percorso di crescita per diventare la quarta nazione al mondo ad essere in grado di far attraccare autonomamente due veicoli nello spazio.
Obiettivi della missione SpaDeX
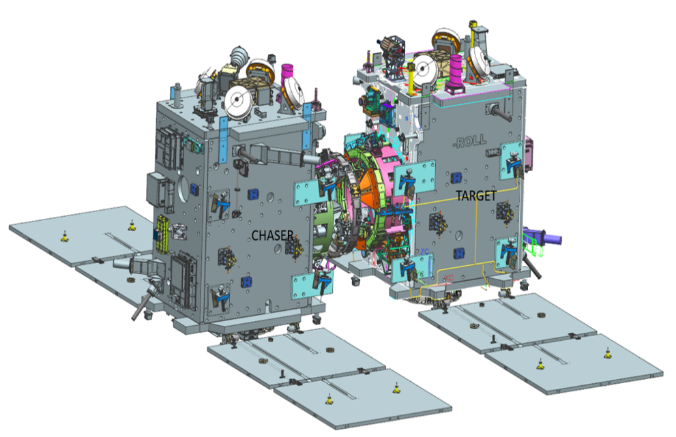
Lo scopo principale della missione SpaDeX è quello di sviluppare e dimostrare la tecnologia necessaria per le operazioni di rendezvous, aggancio e sgancio di due piccoli veicoli in orbita bassa circolare terrestre, denominati SDX01 che è il Chaser (inseguitore) e SDX02 che è il Target (Bersaglio).
Gli obiettivi secondari includono:
- dimostrazione del trasferimento di energia elettrica fra i due veicoli agganciati;
- controllo dei due satelliti agganciati;
- gestione dei carico utile dopo lo sgancio.
La missione
I due dimostratori tecnologici, del peso di circa 220 kg ciascuno e alimentati dall’energia generata dai propri pannelli fotovoltaici (fino a 528 W), sono stati lanciati da un vettore PSLV-CA (Core Alone, ovvero senza i booster laterali a propellente solido) in un orbita circolare di 470 km e con un’inclinazione di 55°. La precisione del PSLV-CA servirà a porre una piccola velocità relativa fra i due satelliti al momento della loro separazione dal lanciatore, pertanto si prevede che nell’arco di un giorno la loro distanza relativa dovrebbe aggirarsi fra i 10 e i 20 km. A questo punto, la differenza di velocità fra i due veicoli spaziali verrà azzerata dal satellite Target, tramite l’impiego dei suoi propulsori.

Al termine di questa manovra, Target e Chaser saranno sulla medesima orbita ad un’identica velocità, ma separati di circa 20 km. Di seguito, il Chaser effettuerà un avvicinamento al Target riducendo la distanza da esso, a 5 km, 1,5 km, 500 m, 225 m, 15 m, 3 m fino a completare la manovra di aggancio fra i due veicoli. Dopo aver ultimato il serraggio dei meccanismi di aggancio, verrà effettuato il trasferimento di energia elettrica fra i due satelliti, al termine del quale essi verranno fatti sganciare e separare per dare inizio alle operazioni dei loro rispettivi carichi utili; operazioni che hanno una durata pianificata di due anni al massimo.
Le tecnologie appositamente sviluppate per realizzare la missione di aggancio sono le seguenti:
- Il meccanismo di aggancio.
- Una gruppo di sensori per il rendezvous e l’aggancio.
- La tecnologia per il trasferimento di energia.
- La procedura per le operazioni di rendezvous e aggancio.
- Collegamento per le comunicazioni inter-satellite per le comunicazioni autonome fra i dimostratori tecnologici, con in aggiunta il sistema per il riconoscimento degli stati dei sistemi dell’altro satellite.
- Processore Relative Orbit Determination and Propagation (RODP) basato su tecnologia GNSS (Global Navigation Satellite System), per la determinazione della posizione e velocità relative dell’altro satellite.
- Banchi di prova per la simulazione, il collaudo e la convalida della progettazione hardware e software.
Inoltre, a causa delle dimensioni e delle masse ridotte dei due dimostratori tecnologici, le manovre di prossimità saranno più sfidanti rispetto a quelle richieste per l’aggancio di due grossi veicoli spaziali. Questa missione fungerà da precorritrice per le capacità di aggancio autonomo necessarie per le future missioni lunari come Chandrayaan-4, senza il supporto della rete GNSS dalla Terra. Il sistema GNSS (Sistema Satellitare Globale di Navigazione), è un sistema di geo-localizzazione e navigazione terrestre, marittima o aerea, che utilizza una rete di satelliti artificiali collocati su determinatte orbite e pseudoliti.
Meccanismo di aggancio
Il meccanismo di aggancio è un sistema a basso impatto (con una velocità di approccio dell’ordine dei 10 mm/s), androgino (i sistemi sono identici per entrambi i veicoli) ed è un sistema di docking con anello periferico, che è una soluzione simile a quella dell’International Docking System Standard (IDSS), il quale è lo standard impiegato dalle altre agenzie spaziali per i voli abitati. Il meccanismo è più piccolo (450 mm di apertura) con un grado di libertà per l’estensione ed impiega due motori, mentre l’IDSS ha un’apertura di 800 mm e utilizza 24 motori.
Sensoristica
La suite addizionale di sensori include il Laser Range Finder (LRF) con i Corner Cube Retro Reflectors. Questo sistema funziona ad una distanza che va dai 6000 ai 200 m. Il gruppo di sensori Rendezvous Sensors (RS) viene attivato ad un range di distanze che va da 2000 a 250 m e da 250 a 10 m. I sensori RS forniscono la posizione relativa sugli assi cartesiani x, y, z; mentre l’LRF determina sia la posizione relativa che la velocità, in maniera indipendente. Il Proximity and Docking Sensor (PDS) fornisce la posizione relativa e la velocità in un range di distanza che va dai 30 m ai 40 cm, mentre i Laser Diodes (Lds) vengono usati come bersagli per gli RS e per il PDS.
Un monitor video entra in funzione alla distanza di 20 metri per effettuare la ripresa dell’aggancio. Dagli 8 ai 4 cm di distanza si attiva il Mechanism Entry Sensor (MES) per rilevare l’ingresso dei meccanismi del Chaser in quelli del Target.
Sistema di posizionamento
Come tutti i satelliti dell’ISRO in orbita bassa terrestre, entrambi i dimostratori SpaDeX sono dotati di un sistema di posizionamento basato sul noto sistema GNSS, il quale fornisce dati posizionamento, navigazione e tempo. Per la missione SpaDeX è stato incluso un nuovo processore RODP nel ricevitore SPS, il quale permette la determinazione accurata della posizione relativa e della velocità di Chaser e Target.
Algoritmi per il rendezvous e l’aggancio
Fino ad una distanza inter-satellite (Inter-Satellite Distance – ISD) di 5 km, gli algoritmi impiegati per il controllo attitudinale e il mantenimento dell’orbita, sono gli stessi di quelli usati dai veicoli spaziali indiani in orbita bassa terrestre. Essendo i due satelliti in un’orbita circolare, qualsiasi incremento o decremento di velocità porterà ad un cambiamento dei parametri orbitali, quindi al di sotto dei 5 km entreranno in azione degli specifici algoritmi che permetteranno la riduzione della ISD fra i due velivoli, effettuando delle opportune soste nell’avvicinamento per il controllo dello stato dei sensori e del software, ed infine per gestire la fase finale della manovra.
Attività post-aggancio
Dopo le operazioni di aggancio e sgancio, i due dimostratori proseguiranno separatamente la loro missione orbitale utilizzando la loro strumentazione.
- L’unità SDX01 (Chaser) è dotata di una fotocamera ad alta risoluzione, High Resolution Camera (HRC) con una risoluzione spaziale (Instantaneous Geometric Field Of View– IGFOV) di 4,5 m e una “spazzata” di 9,2 x 9,2 km in modalità scatto e di 9,2 x 4,6 km in modalità video da un’altitudine di 450 km. Si tratta di una versione ridotta della fotocamera da ricognizione sviluppata da Space Application Center (SAC) dell’ISRO,
- Un Miniature Multi Spectral Payload (MMX), anch’esso sviluppato da SAC, è installato in SDX02 (Target). Esso opera su quattro bande dello spettro visibile e del vicino infrarosso (Visible and Near Infrared – VNIR), con una lunghezza d’onda dai 450 agli 860 nm, con un IGFOV (risoluzione spaziale) di 25 m e una “spazzata” di 100 km da un’altitudine di 450 km. Le immagini così raccolte saranno utili per il monitoraggio delle risorse naturali e per gli studi sulla vegetazione,
- Sempre sull’unità Target (SDX02) è installato un Radiation Monitor (RadMon) il quale ha il compito di dosare le radiazioni dell’ambiente orbitale. Questi dosaggi saranno d’aiuto per la generazione di un archivio delle radiazioni presenti in orbita per un futuro impiego unitamente alle misurazioni di altri due strumenti Total Ionization Dosimeter (TID) e Single Event Upset (SEU) nelle scienze spaziali e per il volo spaziale umano.
Sviluppo e gestione della missione
I due veicoli spaziali sono stati progettati e realizzati dall’UR Rao Satellite Centre (URSC) dell’ISRO, situato in Bangalore, con il supporto degli altri centri dell’ISRO. Durante la fase orbitale i due veicoli spaziali verranno controllati tramite le stazioni di terra dell’ISO Telemetry, Tracking and Command Network (ISTRAC) con l’aggiunta di altre stazioni esterne all’organizzazione. Le fasi di integrazione e di test sono state completate presso la M/s Ananth Technologies di Bangalore sotto la supervisione dell’URSC.
La missione POEM-4
Il PS4-Orbital Experiment Module (POEM) consiste nell’impiego del quarto stadio esausto del razzo PSLV (Polar Synchronous Launch Vehicle) come piattaforma per il trasporto di esperimenti. Esso rappresenta un’opportunità per la comunità scientifica di compiere degli esperimenti in microgravità per un determinato periodo di tempo, che può raggiungere anche i tre mesi. Questi payload sperimentali, fungono da precursori per la validazione di diverse tipologie di esperimenti e di tecnologie per future missioni spaziali.
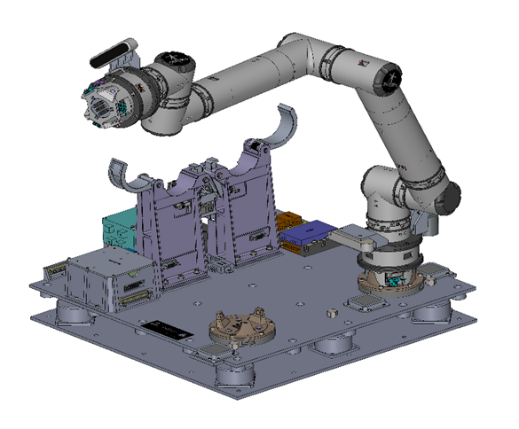
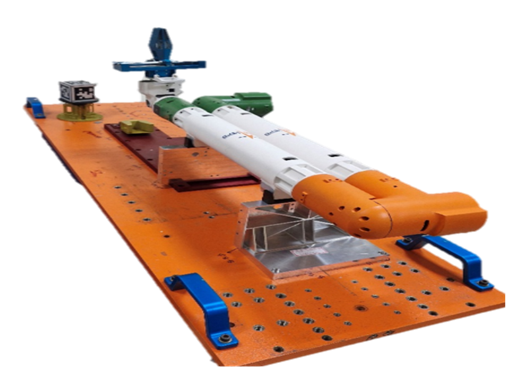
In questa quarta missione del sistema POEM, verranno trasportati un totale di 24 esperimenti, di cui 14 provenienti dai centri dell’ISRO e del Department of Space (DOS) indiano, fra cui si evidenziano un braccio robotico mobile (Walking Robotic Arm) e un braccio robotico per la cattura di detriti spaziali (Debris Capture Robotic Arm). Mentre fra i 10 esperimenti provenienti da vari enti non governativi, comprese università e start-up, due esperimenti riguardano la propulsione green.
Al seguente link è possibile scaricare la brochure della missione: SpaDeX/POEM-4.
Il filmato trasmesso dal canale ufficiale dell’ ISRO.
La conferenza stampa post lancio.
Fonti: ISRO1, ISRO2; Spacenews
 Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
