


Dalla primissima missione interplanetaria nel febbraio 1961 (Venera-1 da parte dell’Unione Sovietica) fino a Mars 2020 (lanciata nel luglio 2020 dalla NASA, l’agenzia spaziale statunitense), le sonde che hanno esplorato i vari corpi celesti potevano essere classificate sulle due modalità di conduzione della missione.
Ci sono state infatti sonde che si sono schiantate di proposito sulla superficie raccogliendo dati durante la discesa o che hanno effettuato solamente un passaggio ravvicinato, un flyby. Tante si sono immesse in orbita attorno al corpo celeste e molte meno hanno invece galleggiato in dense atmosfere per qualche settimana. L’altra classe di missioni si dirigeva invece verso la superficie, inizialmente con sonde stazionarie, i lander, ed in seguito con capacità di movimento, i rover.
Queste due classificazioni hanno resistito fino al 19 aprile 2021, quando il drone Ingenuity è diventato il primo oggetto costruito dall’uomo ad effettuare un volo propulso dalla superficie di un altro corpo celeste, dimostrando la possibilità di utilizzare questa nuova classe di veicoli per le missioni future.

Nonostante i piani prevedessero l’uso e la dimostrazione delle tecnologie di Ingenuity solamente per i successivi 30 giorni, l’elicottero venne promosso ad un vero e proprio strumento scientifico a supporto del rover Perseverance. La missione del drone venne poi dichiarata conclusa ad inizio 2024, dopo che un impatto con il terreno danneggiò una delle pale durante il 72o volo, il 18 gennaio 2024.
Se Ingenuity era però di dimensioni contenute (pesava 1,8 kg e non disponeva di strumenti scientifici se non due camere per la navigazione) la prossima missione che prenderà il volo, letteralmente, sarà ben più grande. Si tratta di Dragonfly, un doppio quadricottero in fase di sviluppo da NASA, con una massa di 875 kg e delle dimensioni di una piccola automobile. Atterrerà nel dicembre 2034 su Titano, un satellite di Saturno, dopo essere partita con un Falcon Heavy nel luglio 2028.
Se l’esplorazione in orbita, in superficie e in atmosfera è oramai consolidata, nonostante rimanga comunque una impresa delicata e complessa, nessuna agenzia spaziale è riuscita finora ad effettuare una missione in un qualsiasi ambiente acquatico. I depositi di composti allo stato liquido in superficie sono infatti presenti sulla Terra, mentre in tutti gli altri casi si trovano al di sotto di uno strato di materiale ghiacciato più o meno spesso, come ad esempio su Titano o Encelado, due lune di Saturno, o su Europa, Callisto o Ganimede, tre lune di Giove.
NASA sta quindi sviluppando Sensing With Independent Micro-Swimmers (SWIM), un nuovo tipo di sonda da utilizzare negli oceani degli altri corpi celesti del sistema solare. Come il nome suggerisce non si tratta solamente di un solo esemplare, ma di una schiera di decine di piccole unità in grado di studiare le condizioni chimiche e fisiche della zona in cui sono state rilasciate per verificarne la possibilità di sostenere forme di vita, almeno per come sono intese attualmente. L’immissione di queste microsonde avverrebbe con un cosiddetto cryorobot, di cui parliamo meglio più avanti.
Sebbene si tratti di una tecnologia ancora molto immatura e che necessita di significativi sviluppi tecnologici, il Jet Propulsion Laboratory (JPL) ha recentemente indetto una competizione tra alcuni concetti prototipo di SWIM, con risultati definiti «incoraggianti».
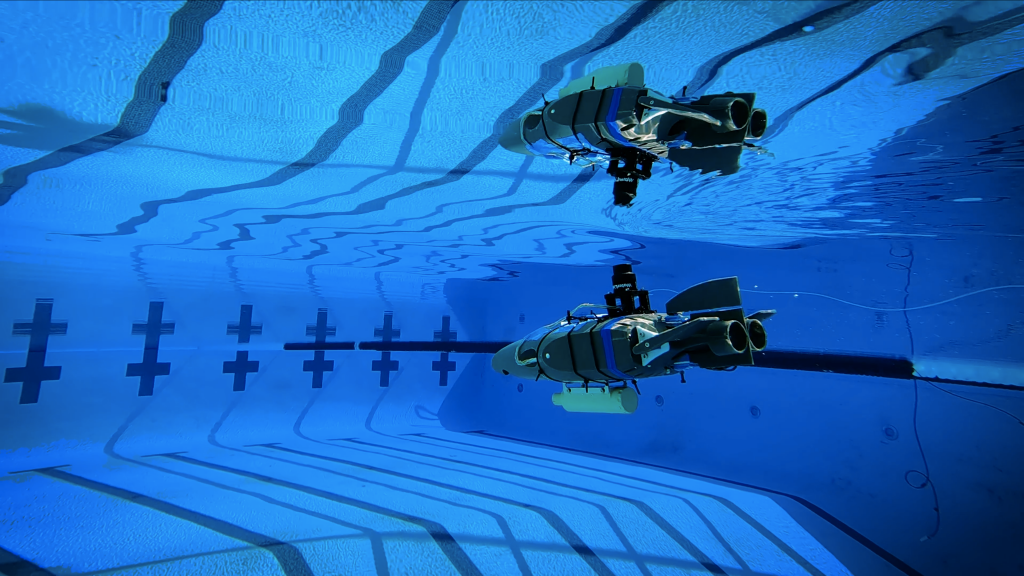
L’ultimo modello presentato è stampato in 3D con della plastica, è dotato di due propulsori e quattro flap, ed è completamente autonomo, una caratteristica fondamentale per le future missioni. È un prototipo a basso costo, dal momento che sia l’elettronica che i motori sono liberamente disponibili in commercio.
Durante il test, effettuato in una piscina semi-olimpionica, il concept ha completato con successo tutte le sfide che ha affrontato: capacità di mantenere la rotta, correggere eventuali deviazioni e di seguire un percorso di esplorazione predefinito, il tutto mantenendo assetto e abilità di manovra.

Il modello utilizzato pesava 2,3 kg ed era lungo 42 cm, dimensioni chiaramente non compatibili con l’idea iniziale di inviarne decine su altri corpi celesti: le versioni operative dovranno essere tre volte circa più piccole (12 cm) e con un volume di 60-75 cm3. Qualora queste dimensioni venissero raggiunte, sarebbe possibile contenerne circa 48 in un contenitore grande 10 × 25 cm.


Il design finale comprenderà parti miniaturizzate e costruite appositamente per la sonda, oltre a disporre di un sistema di comunicazione a ultrasuoni per la trasmissione di dati e la triangolazione della posizione. Le sonde saranno comunque collegate con un cavo al robot che le rilascia, permettendo così l’acquisizione della telemetria: di contro, non potranno esplorare che gli strati immediatamente vicini alla crosta ghiacciata, considerati comunque di interesse biologico.
Raggiungere le dimensioni finali richiederà diversi anni di sviluppo tecnologico: nel frattempo gli ingegneri stanno mettendo a punto versioni digitali per simulare il comportamento all’interno di ambienti caratterizzati da una gravità e pressione diversa. In questo modo è possibile studiare le limitazioni dei robot per raccogliere dati scientifici e affinare nuovi algoritmi per una esplorazione più efficace. tenendo in considerazione la durata di due ore delle batterie di bordo, il volume di oceano esplorabile e il numero di esemplari rilasciati per volta.
Lo sviluppo di questa nuova classe di sonde ha portato anche a progressi nella sensoristica utilizzata: dei ricercatori del Georgia Tech di Atlanta, in Georgia, hanno realizzato il primissimo chip in grado di studiare temperatura, pressione, pH, conduttività e composizione chimica simultaneamente, il tutto in pochi millimetri quadrati.

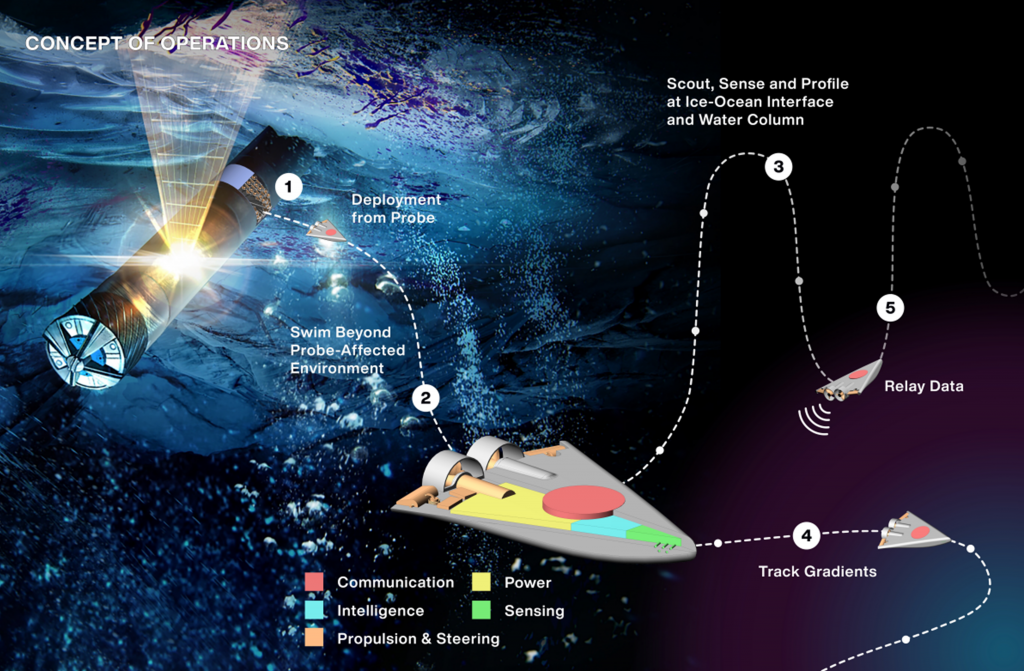

L’uso di una formazione di microsonde permetterà anche di avere dati da punti diversi dell’ambiente, potendo quindi stabilire se esistono dei gradienti nella temperatura, pressione, pH, salinità e in altri fattori: la presenza di queste differenze è ritenuta uno dei fattori necessari alla formazione della vita.
Il concept di SWIM è stato proposto da Ethan Schaler, un ingegnere del JPL, e ha ricevuto 125.000 dollari di finanziamento per studiare fattibilità e diverse opzioni di design nel 2021. Il pagamento era parte della prima fase del NASA Innovative Advanced Concepts (NIAC), un programma della NASA volto a supportare progetti e missioni particolarmente ambiziosi e innovativi. Con la seconda fase del programma Schaler ha ricevuto altri 600.000 dollari nel 2022, permettendogli di passare dal design alla stampa 3D dei prototipi. Una delle innovazioni portate dall’ingegnere è una maggior miniaturizzazione rispetto ad altre missioni proposte e al conseguente aumento di esemplari che è possibile rilasciare.
Samuel Howell, ingegnere del JPL che lavora anche su Europa Clipper, ha paragonato SWIM a Ingenuity per il ruolo di supporto che ha avuto con Perseverance: il drone, pur necessitando del rover per comunicare, poteva esplorare le zone circostanti e fornire indicazioni sul miglior percorso da intraprendere. Così faranno le microsonde: permetteranno di esplorare e fornire dati da una regione inaccessibile dal solo cryobot.
Cryobot
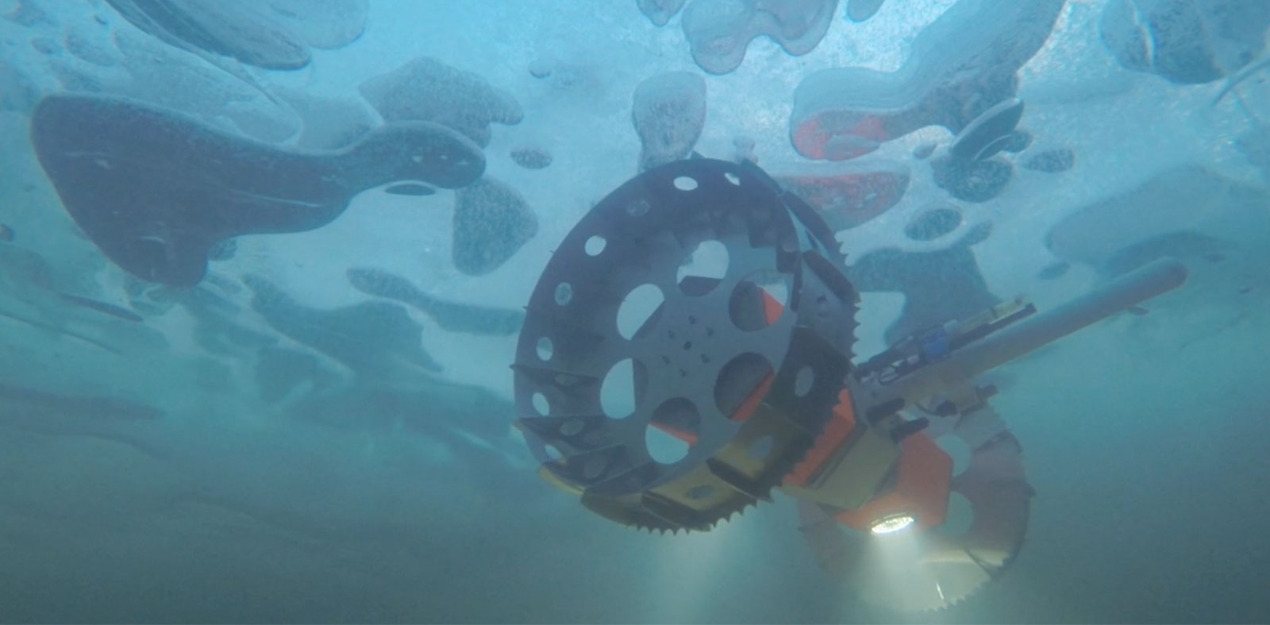
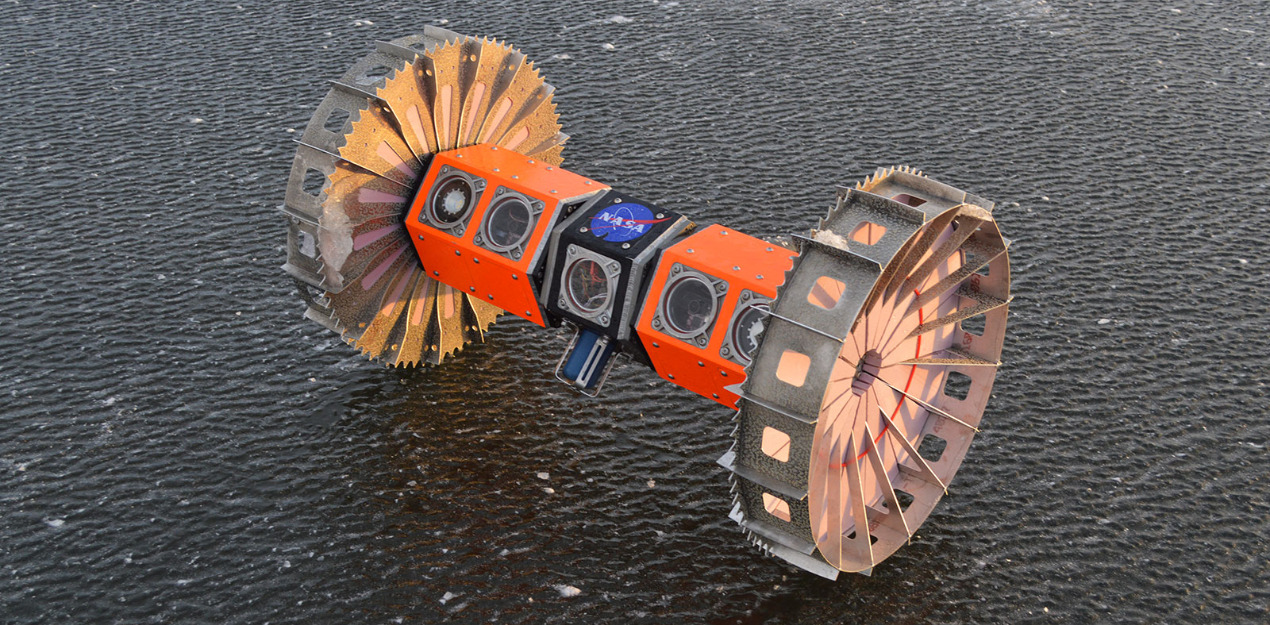
NASA è comunuque al lavoro non solo sulle mini-sonde marine, ma anche sui robot, definiti dall’agenzia «cryobot», nel contesto del programma SESAME (Scientific Exploration Subsurface Access Mechanism for Europa), appositamente progettato per Europa, ma anche altri.
Uno dei concept di cryobot allo studio da parte di NASA è PRIME (Probe using Radioisotopes for Icy Moons Exploration): si tratta di un tubo di 23 cm di diametro, lungo 3,9 m e con una massa di 350 kg. All’interno dei 150 litri di volume, ci sarebbe spazio per 30 L di payload scientifico, mentre il resto verrebbe occupato da sette generatori nucleari alimentati da plutonio 238, dai sistemi di comunicazione e altra strumentazione necessaria al funzionamento.


La durata della missione sarebbe molto lunga: la discesa all’interno della crosta di ghiaccio, spessa diversi chilometri, avverrebbe tra i 25 cm/ora negli strati più freddi (intorno ai -100 °C) e intorno ai 180 cm/ora in quelli più caldi (-20 °C): in totale si impiegherebbero tra i due e i sei anni per la discesa, in base allo spessore della crosta. La perforazione sarebbe di tipo termico: la punta del cilindro verrebbe riscaldata, semplificando molto, grazie all’energia termica generata dall’RTG, sciogliendo il ghiaccio.


Le altre proposte
Tra le proposte che SWIM si propone di sostituire figura BRUIE (Buyoant Rover for Under Ice Exploration) un rover che avrebbe dovuto “camminare” sulla superficie interna del ghiaccio, quella a contatto con l’acqua. BRUIE era stato testato per qualche mese alla stazione di ricerca Casery in Antartide, nella regione “australiana” del continente.

Lo studio della regione di contatto tra la crosta ghiacciata e l’ambiente liquido al di sotto viene considerato fondamentale per la ricerca di vita, in quanto molto spesso forme di vita sono state trovate in questa parte. BRUIE permetterebbe di ridurre significativamente i rischi nelle indagini scientifiche rispetto agli approcci tradizionali, basati su “sottomarini”: questi non devono prima di tutto scontrarsi con la superficie ghiacciata, consumando così molta energia. L’approccio di BRUIE, basato sulla naturale tendenza del rover a galleggiare, garantirebbe un ancoraggio saldo e la resistenza alle correnti e addirittura l’accensione del rover per i periodi strettamente necessari ad effettuare le misure.
La suite di strumenti di BRUIE, lungo tra il mezzo metro e il metro e dotato di due ruote, include due telecamere ad alta definizione e sensori per misurare l’ossigeno disciolto, la salinità dell’acqua, pressione e temperatura.
Fonti: JPL, NASA (1), NASA (2), paper su PRIME
![]()
