


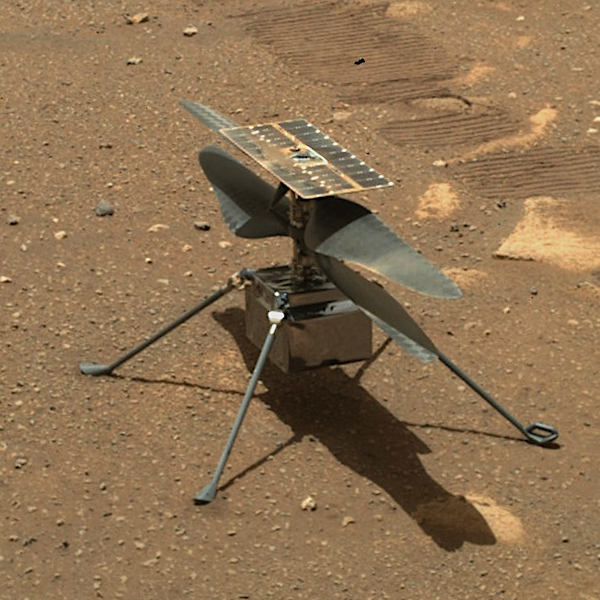
Il 3 agosto, l’elicottero Ingenuity della NASA ha effettuato con successo la sua 54ª missione, ovvero la prima da quando l’elicottero aveva dovuto interrompere il volo dello scorso 22 luglio. Si è trattato di un volo breve, durato solo 24,4 secondi, che ha toccato una quota massima di 5 metri senza effettuare alcun spostamento orizzontale. Lo scopo di questo volo, detto “pop-up”, era fornire dati che potrebbero aiutare il team di Ingenuity a determinare i motivi che avevano indotto l’elicottero a concludere in anticipo la precedente missione, la 53ª.
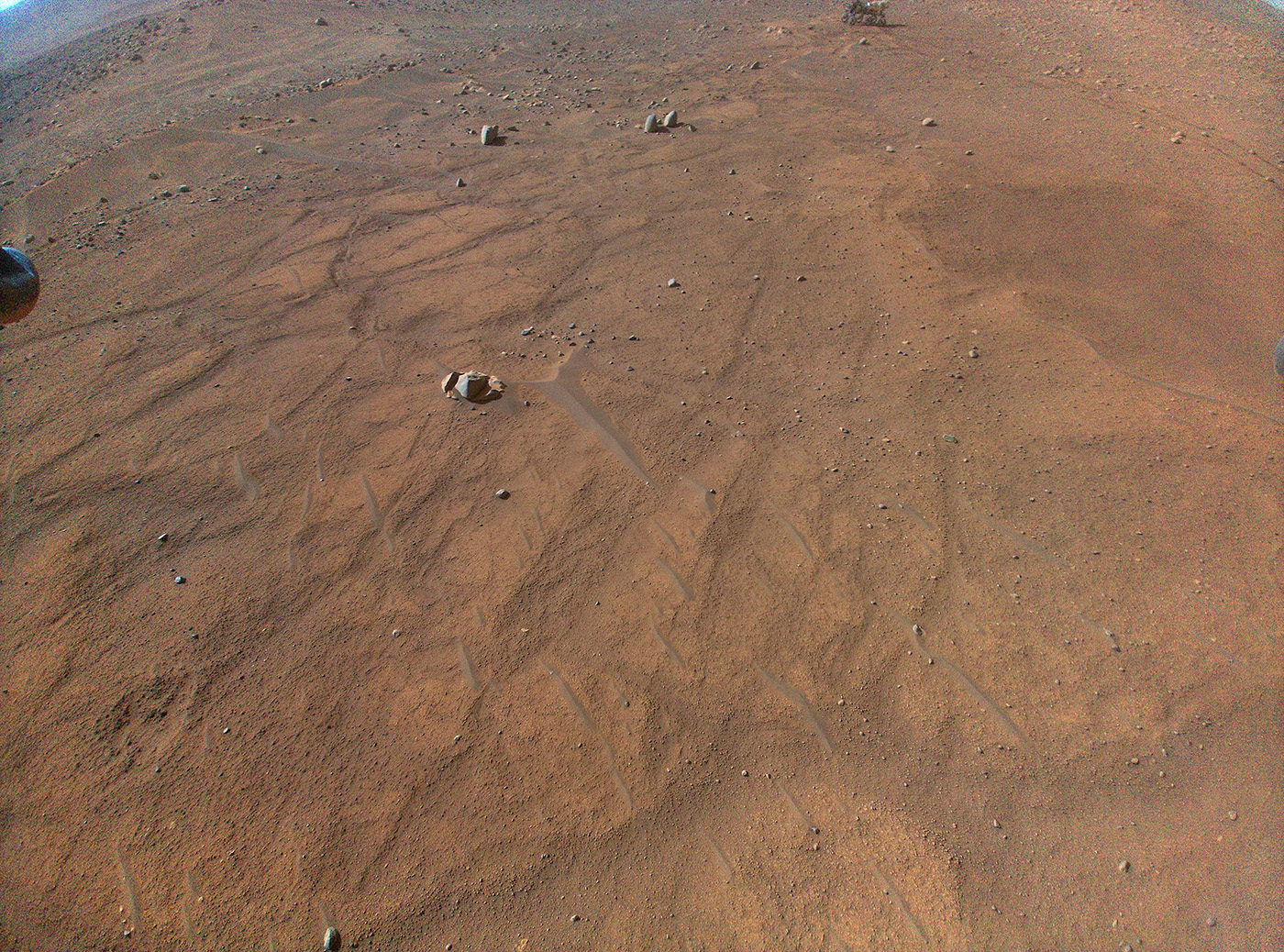
Il 53º volo era una missione di ricognizione della durata di 136 secondi, dedicata alla raccolta di immagini della superficie del pianeta per il team scientifico del rover Perseverance. Il complicato profilo di missione prevedeva un volo di 203 metri in direzione nord effettuato a un’altitudine di 5 metri e una velocità di 2,5 m/s, seguito da una abbassamento di quota a 2,5 metri per sorvolare e fotografare uno sperone roccioso. Al termine del sorvolo della roccia, Ingenuity sarebbe dovuto salire a una quota di 10 metri per consentire la riattivazione del suo sistema di rilevazione ostacoli prima di scendere e atterrare.
L’elicottero ha eseguito la prima metà del viaggio volando verso nord a un’altitudine di 5 metri per 142 metri, dopodiché ha attivato un programma di emergenza che lo ha portato a un atterraggio immediato 74 secondi dopo il decollo. Gli ingegneri del Jet Propulsion Laboratory della NASA avevano incluso nel software di volo dell’elicottero un programma chiamato LAND_NOW, una procedura progettata per far atterrare l’elicottero il prima possibile al verificarsi di uno scenario previsto ma non nominale. Nel corso del 53º volo l’elicottero ha riscontrato una di queste situazioni, e il software ne ha forzato l’atterraggio immediato. Se da un lato l’attivazione della procedura di emergenza non rappresenta un buon segno, dall’altro questo intervento ha permesso di preservare l’elicottero. La motivazione data dagli ingegneri riguarda un mancato sincronismo tra le immagini rilevate dalla NavCam (una fotocamera a bassa risoluzione in bianco e nero che serve a fornire l’orientamento e la “lettura del terreno”) e l’unità di misura inerziale. Questa unità rileva l’accelerazione e la velocità di rotazione di Ingenuity, dati che consentono di stimare la posizione dell’elicottero, la velocità e la direzione del suo movimento.
Il problema della mancata sincronizzazione delle immagini con il sistema inerziale dell’elicottero non è un nuovo. Un primo evento di questo genere si era verificato il 22 maggio 2021 nel corso del 6º volo, quando lo scarto di diversi fotogrammi aveva innescato un eccessivo beccheggio e rollio in fase di atterraggio. Al termine di questo volo, il team di specialisti aveva analizzato quanto era accaduto e aveva inviato all’elicottero un aggiornamento del software di volo. Questa correzione ha funzionato bene per i successivi 46 voli, ma durante la 53ª missione la quantità di immagini scattate dalla fotocamera ha superato il limite configurato nella patch software. Questo sovraccarico ha portato all’attivazione del comando di atterraggio d’emergenza.
Nessuno al JPL ha mai desiderato vedere l’attivazione di una procedura di LAND_NOW, ma mentre il team di ingegneri sta lavorando per capire meglio cosa è successo, il successo del volo successivo rende tutti più fiduciosi sul fatto che l’elicottero sia pronto per tornare a voli regolari.
Ingenuity ha iniziato la sua vita su Marte come dimostratore tecnologico. Ha volato per la prima volta il 19 aprile 2021, librandosi a 3 metri di altezza per 30 secondi. Nelle quattro settimane successive sono state effettuate altre 4 missioni totalizzando 499 secondi di volo e 357 metri di traslazioni. Dopo aver dimostrato che volare su Marte era possibile, a maggio 2021 Ingenuity è entrato in una fase operativa.
La principale missione di Ingenuity era dimostrare che un drone potesse volare su Marte e, come abbiamo visto, le aspettative sono state ampiamente superate poiché la stima iniziale era di 5 voli e ora siamo al 54º.
L’elicottero Ingenuity è stato costruito dal JPL, che gestisce anche il progetto per il quartier generale della NASA. È supportato dal Science Mission Directorate della NASA. L’Ames Research Center della NASA nella Silicon Valley in California e il Langley Research Center della NASA a Hampton, in Virginia, hanno fornito significative analisi delle prestazioni di volo e assistenza tecnica durante lo sviluppo di Ingenuity. Anche AeroVironment Inc., Qualcomm e SolAero hanno fornito assistenza alla progettazione e ai principali componenti del veicolo. Lockheed Space ha progettato e prodotto il Mars Helicopter Delivery System.
Fonte: NASA
![]()
