



Ingenuity non finisce di stupire. Il piccolo drone, un elicottero dimostratore tecnologico progettato per verificare la fattibilità di realizzare brevi voli su Marte, ha effettuato domenica 5 dicembre il suo 17º volo percorrendo 187 metri in direzione nord-est, proseguendo il suo viaggio di ritorno all’Octavia E. Butler Landing Site, ovvero il luogo di atterraggio su Marte. Il tutto si è svolto regolarmente anche se l’ultima parte del volo, poco prima dell’atterraggio, ha evidenziato un’interruzione delle comunicazioni tra il drone e il rover Perseverance.


L’analisi della telemetria ricevuta dal JPL ha evidenziato che il blackout è avvenuto quando il drone si trovava a circa 3 m di altezza, dopo aver effettuato l’intero volo a una quota stabile di 10 m.
Circa 15 minuti dopo l’atterraggio Perseverance ha ricevuto e successivamente inviato a Terra altri pacchetti dati che hanno confermato la piena salute del drone, mostrando inoltre l’efficienza e l’integrità delle batterie e della loro ricarica. Questo può avvenire solamente se il pannello solare è correttamente posizionato e orientato. Prima di pianificare la nuova tappa, la NASA dovrà completare l’analisi dei dati telemetrici del volo appena concluso, ma si ritiene di tornare a far volare Ingenuity entro le prossime due settimane. L’analisi della telemetria ha confermato che il veicolo ha funzionato nominalmente su tutta la linea durante il suo volo di 117 secondi a 10 metri di quota. L’interruzione del flusso telemetrico è avvenuto solamente nella fase finale del volo.
Collegamenti radio
Il blackout nella ricezione dei dati telemetrici non è stato provocato da un problema di Ingenuity, ma da una perdita di segnale tra il drone e il rover Perseverance. Ricordiamo che Ingenuity non comunica direttamente con le stazioni radio a Terra ma sfrutta le antenne del rover che svolgono il ruolo di ponte radio.
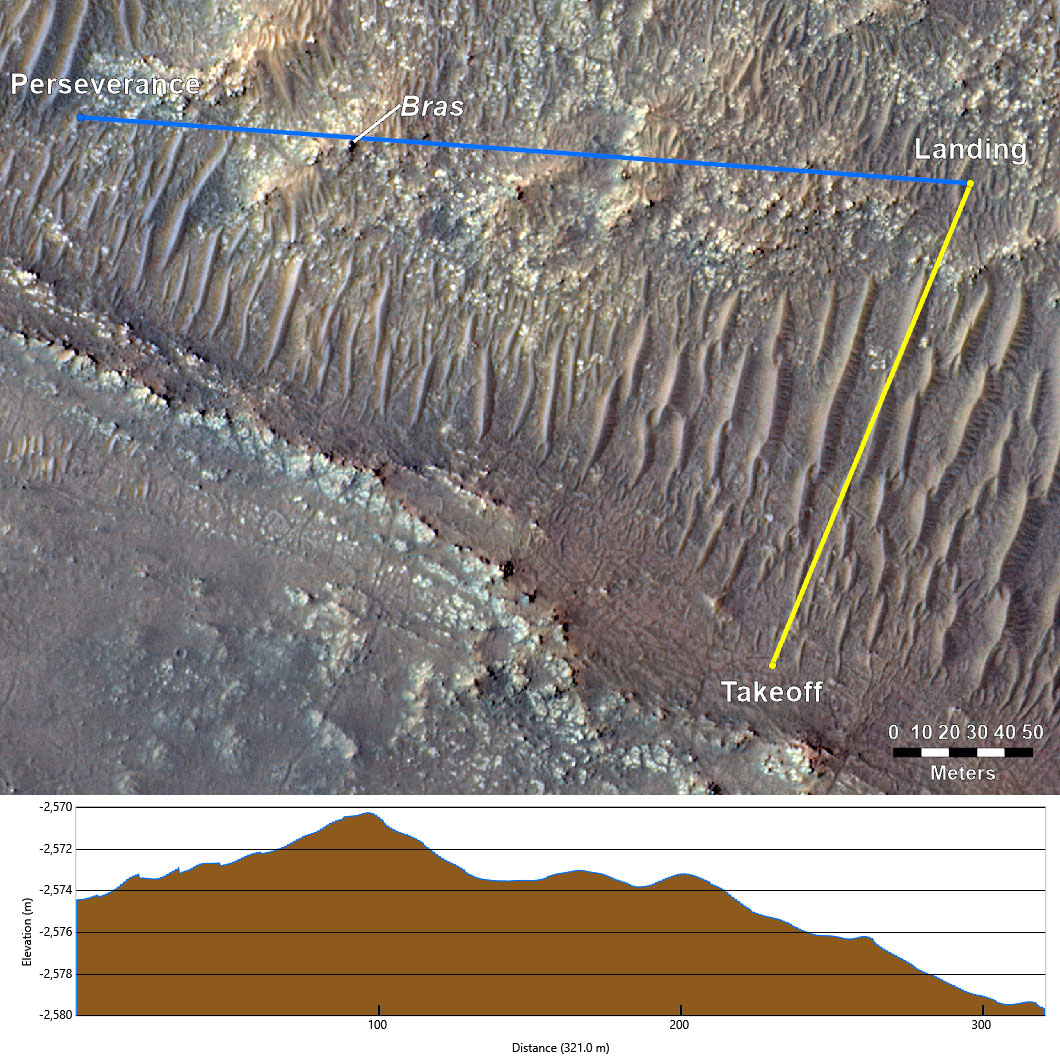
La capacità di invio e ricezione di un segnale radio dipende in modo significativo da quanto è libero il percorso (o linea di visibilità, line-of-sight, LOS) tra l’antenna del trasmettitore e quella del ricevitore. Tale percorso può trovare ostacoli nel terreno stesso, se ad esempio l’elicottero atterra in una depressione o dall’altra parte di una collina, oppure può essere ostruito da elementi della struttura del rover se la posizione dell’elicottero non è visibile dalle sue antenne. In questo caso sembrano essersi manifestate entrambe le casistiche. Il drone è atterrato in posizione opposta rispetto all’orientamento dell’antenna di Perseverance, quindi tra le due antenne, quella del drone e quella del rover, si frapponevano la scocca stessa del rover e il generatore a radioisotopi (RTG); inoltre il drone ha volato verso il sito di atterraggio incontrando sulla sua rotta una collina chiamata Bras (dal nome di un comune in Francia). Volando a un’altitudine di crociera di 10 m, Bras non è stata per Ingenuity un ostacolo al collegamento radio durante la maggior parte del volo, ma quando il drone ha iniziato la discesa, la linea di visibilità tra il rover e l’antenna dell’elicottero ha iniziato a essere ostacolata da Bras.
Quando era stato pianificato il volo 17, era stata prevista anche l’esatta direzione e posizione di parcheggio del rover. Tuttavia, i piani di Perseverance cambiano di giorno in giorno per massimizzare il ritorno scientifico di ogni sua missione. Quando il volo 17 era pronto per l’esecuzione Perseverance si è trovato in una nuova posizione, parcheggiato lungo una rotta impegnativa per le comunicazioni radio. Siccome NASA aveva già previsto la possibilità di avere a che fare con problemi dovuti a perdite di segnali radio tra i due mezzi, Ingenuity, che vola in modalità autonoma, è stato progettato per gestire queste situazioni spegnendosi automaticamente al termine del volo e rimanere in attesa di ulteriori istruzioni.
Valutazione del volo
Il volo è stato un successo perché nulla di quanto analizzato suggerisce un esito diverso. I dati di telemetria sono nominali fino al momento dell’interruzione del collegamento radio. Ancora più significativi sono i pacchetti di dati ricevuti 15 minuti dopo l’orario di atterraggio. Questi pacchetti includevano anche informazioni sulla tensione delle batterie, +76 millivolt, oltre alla indicazione dell’aumento dello stato di carica di +1,2% in 15 minuti. In altre parole, le batterie sono state correttamente ricaricate dal pannello solare del drone. Questo alto livello di carica delle batterie è indice della corretta posizione del veicolo al suolo (verticale) e del corretto orientamento del suo pannello solare.
Prossimi passi
Sarà necessario attendere ancora qualche giorno per completare lo scarico e l’analisi dei dati telemetrici mancanti, dopodiché gli specialisti potranno concludere la valutazione dello stato di salute del drone. Questo volo è stato una tappa del viaggio di ritorno al sito di atterraggio Octavia E. Butler. Il volo successivo, che dovrebbe avvenire tra circa due settimane, vedrà Ingenuity compiere un altro lungo passo di circa 200 m per giungere nei pressi del confine settentrionale della zona denominata S. Séítah.
Fonte: NASA
![]()
