



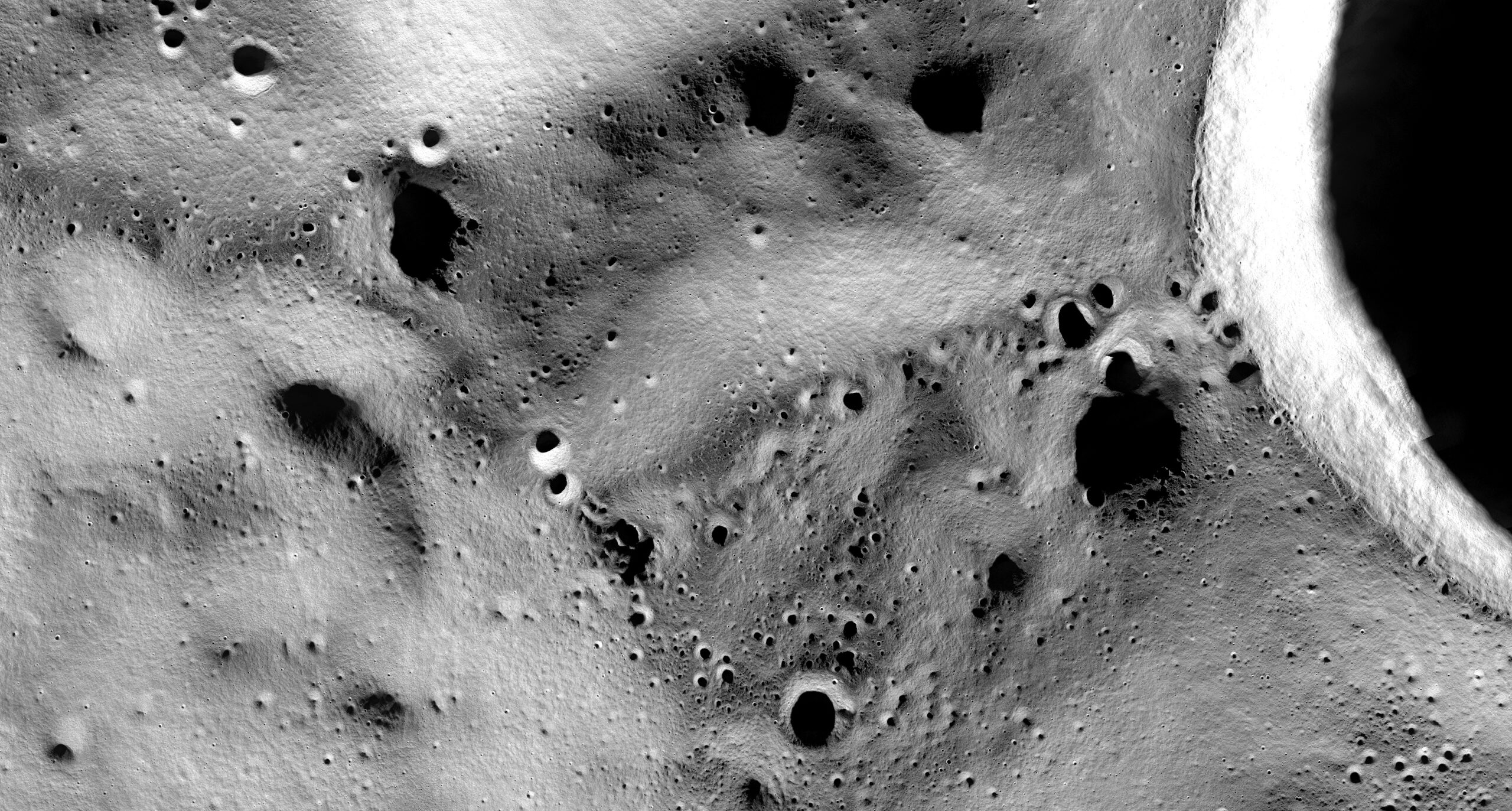
Sul finire del 2022, l’ente spaziale statunitense invierà un esperimento di estrazione del ghiaccio lunare agganciato al lander robotico Nova-C costruito da Intuitive Machines, in un luogo non molto lontano dal bordo del cratere Shackleton situato nel polo sud selenico. Il sito in questione è stato individuato da scienziati ed ingegneri nel corso di un processo di selezione durato mesi.
L’annuncio è stato fatto da NASA e da Intuitive Machines, uno dei partner commerciali dell’agenzia per l’invio di carichi paganti sulla Luna (CLPS), lo scorso 3 novembre.
I dati raccolti dai veicoli in orbita lunare hanno portato alla scelta di questo sito, denominato Shackleton connecting ridge, ovvero “cresta di collegamento di Shackleton”, in quanto si ritiene che ci possa essere ghiaccio al di sotto della sua superficie. Quest’area è sufficientemente soleggiata per garantire un apporto energetico al lander per circa dieci giorni, continuando inoltre a mantenere una visuale diretta verso la Terra, per mantenere sempre costanti le comunicazioni. Inoltre è vicina a un piccolo cratere, meta ideale per un’escursione robotica.
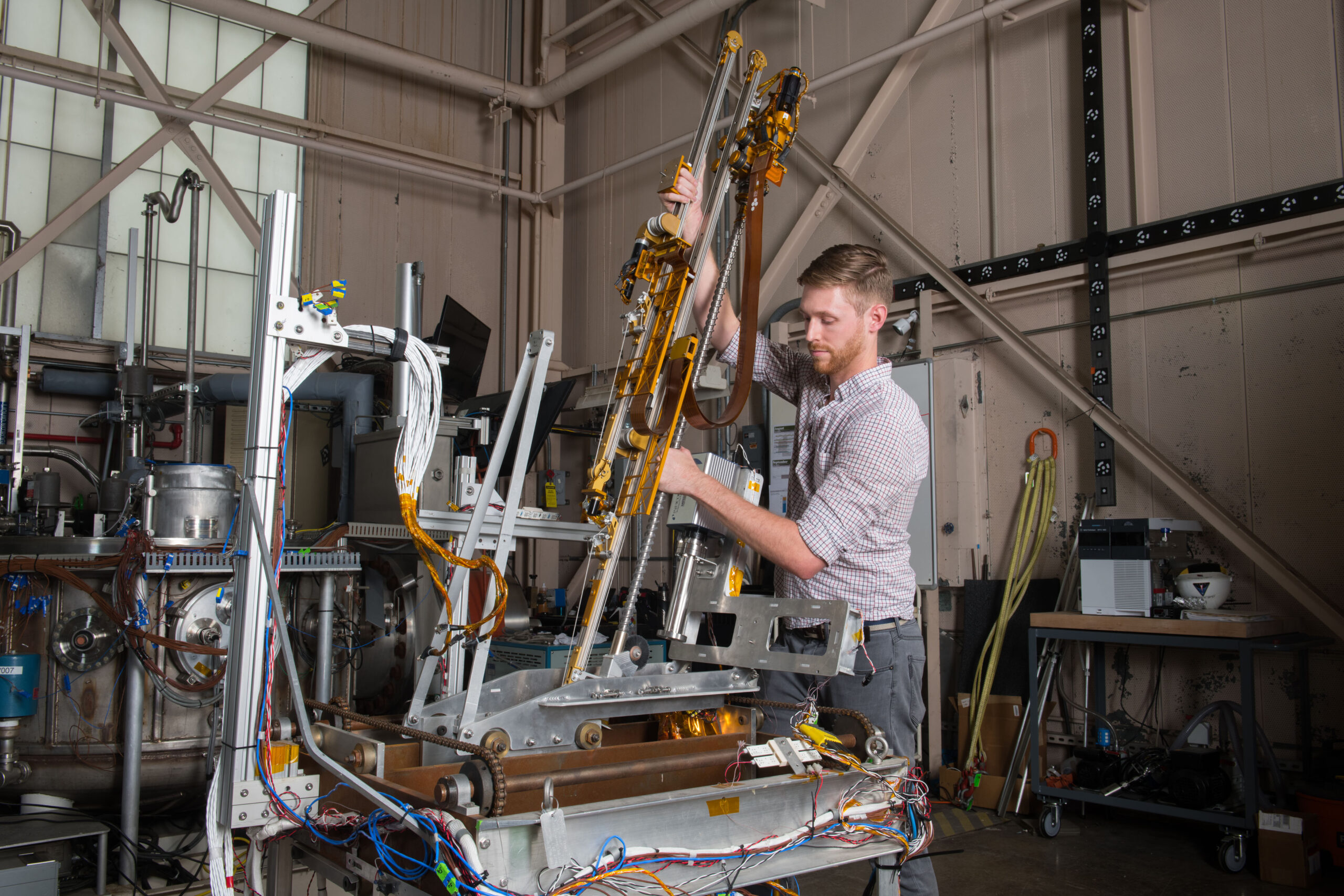
Le suddette condizioni offrono le migliori possibilità di successo per i tre dimostratori tecnologici che saranno a bordo del lander. Fra di essi troviamo il Polar Resources Ice-Mining Experiment-1 (PRIME-1) finanziato da NASA, che è costituito da una trivella accoppiata a uno spettrometro di massa; un network per le comunicazioni 4G/LTE sviluppato da Nokia of America Corporation, e da Micro-Nova, un robot in grado di spostarsi effettuando balzi, fornito da Intuitive Machines.
PRIME-1
«PRIME-1 è permanentemente attaccato al lander Nova-C di Intuitive Machines e trovare un sito di atterraggio in cui poter trovare del ghiaccio entro 1 metro dalla superficie, è stato davvero difficoltoso» ha spiegato la dottoressa Jackie Quinn, manager del progetto presso il Kennedy Space Center della NASA in Florida. «Se da una parte avevamo a disposizione molta luce solare per dare energia ai payload, dall’altra la superficie risultava essere troppo calda per mantenere intatto il ghiaccio raggiungibile dalla trivella di PRIME-1. Avevamo bisogno quindi di trovare un sito né troppo caldo e né troppo freddo che avesse una buona illuminazione solare per permettere il raggiungimento dei requisiti della missione e che nel contempo fosse un luogo di atterraggio sicuro e che assicurasse delle buone comunicazioni con la Terra».
Per selezionare il sito di allunaggio definitivo, gli esperti di NASA, dell’Università dell’Arizona State, del Johns Hopkins Applied Physics Laboratory, della Nokia e di Intuitive Machines, hanno creato delle mappe delle “miniere di ghiaccio” lunari, usando i dati dei sensori remoti.
Dopo l’atterraggio, la trivella di PRIME-1, chiamata The Regolith Ice Drill for Exploring New Terrain (TRIDENT) e costruita da Honeybee Robotics di Pasadena, California, tenterà di penetrare fino a un metro di profondità per estrarre un campione di suolo lunare (regolite) per poi depositarlo sulla superficie al fine di permettere le analisi strumentali per la ricerca dell’acqua. L’altro strumento di cui è dotato PRIME-1, lo spettrometro di massa Mass Spectrometer Observing Lunar Operations (MSolo), rileverà i gas volatili che si sprigioneranno dal materiale appena estratto dal suolo da TRIDENT.

PRIME-1 sarà in sostanza la prima dimostrazione pratica del concetto di “scoperta ed estrazione delle risorse lunari”. Il progresso di questo tipo di tecnologie è un aspetto critico per poter stabilire una robusta e a lungo termine presenza nello spazio profondo, Luna compresa, nell’ambito del programma Artemis. La semplice trivellazione della dura superficie selenica fornirà delle preziose informazioni agli ingegneri, in vista delle future missioni sul nostro satellite, come la missione Volatiles Investigating Polar Exploration Rover (VIPER) il cui allunaggio al polo sud è previsto per la fine del 2023.

Nokia e MAPP
Mentre PRIME-1 effettuerà le sue ricerche al di sotto della superficie lunare e Nokia inizierà a testare la sua rete 4G/LTE studiata per l’ambiente spaziale, un piccolo rover sviluppato da Lunar Outpost e denominato Mobile Autonomous Prospecting Platform (MAPP) si avventurerà ad oltre 1,5 km dal lander Nova-C per testare il network wireless Nokia a varie distanze. Il veicolo da superficie comunicherà alla sua stazione base su Nova-C, e il lander trasmetterà i dati alla Terra. Questa dimostrazione potrebbe preparare il terreno per un sistema commerciale 4G/LTE per le comunicazioni di una determinata criticità sulla superficie lunare. Esse includono comunicazioni radio ed anche streaming video ad alta definizione, dagli astronauti alle stazioni base, dai veicoli alle stazioni base ed altro ancora.
Micro-Nova
Nelle vicinanze del luogo di allunaggio, Micro-Nova di Intuitive Machines, si sposterà saltando in un cratere vicino per acquisire immagini e dati scientifici prima di saltarne fuori. Quindi trasmetterà i suoi dati a Nova-C. Micro-Nova può trasportare un payload di circa 900 grammi a quasi 2,5 km di distanza per fornire accesso ai crateri lunari permettendo la ricognizione ad alta risoluzione della superficie del satellite terrestre. Questa tecnologia potrebbe aprire la strada a servizi commerciali addizionali, per l’esplorazione lunare. In futuro, gli scienziati potrebbero avere l’opportunità di allestire il robot Micro-Nova con strumenti scientifici miniaturizzati, come fotocamere, sismometri e altro ancora.

«Questi dimostratori tecnologici pionieristici implicano delle partnership innovative per fornire preziose informazioni su come operare ed esplorare la superficie lunare» ha dichiarato Niki Werkheiser, direttrice del programma di maturazione tecnologica per lo Space Technology Mission Directorate (STMD) del quartier generale della NASA a Washington.
«I dati alimenteranno i progetti per l’utilizzo delle risorse locali (In Situ Resource Utilization – ISRU), per la mobilità, le comunicazioni, la disponibilità energetica e per le tecniche per la mitigazione delle problematiche legate alla polvere lunare».
Fonte: NASA
![]()
