






Sesto volo da brividi per Ingenuity
Lo scorso 22 maggio, che corrisponde al sol 91, ovvero al novantunesimo giorno dopo l’atterraggio su Marte del rover della NASA Mars 2020 Perseverance, l’elicottero Ingenuity ha eseguito il suo sesto volo (Flight Six).
Gli ingegneri statunitensi intendevano con esso espandere l’inviluppo di volo, ovvero le condizioni operative sopportabili in sicurezza dal velivolo e dimostrare le capacità di ripresa aeree del drone scattando immagini stereoscopiche di una regione di interesse, verso ovest. È stato quindi chiesto a Ingenuity di sollevarsi fino a una quota di 10 m per poi traslare di 150 m verso sud-ovest a una velocità di 4 m/s e quindi di spostarsi di 15 m verso sud riprendendo delle immagini verso ovest e di muoversi di 50 m verso nord-est per poi atterrare.
La telemetria conseguente a questo volo è stata poi analizzata dagli ingegneri della NASA, i quali hanno stabilito che il primo tragitto di 150 m si è concluso con un’anomalia, nel senso che alla fine di questa tratta Ingenuity ha iniziato reiteratamente a correggere la propria velocità e a oscillare in avanti e indietro. Questo comportamento anomalo è continuato per tutto il resto del volo fino all’atterraggio che è avvenuto comunque in sicurezza. Poco prima del touch down, i sensori di bordo hanno indicato che l’elicottero ha oscillato nel rollio e nel beccheggio con ampiezze di oltre 20 gradi, che il suo sistema di guida ha dovuto effettuare molte correzioni con conseguenti picchi nel consumo elettrico.
Come rileva il movimento Ingenuity?
Mentre vola, Ingenuity determina il proprio movimento tramite l’Inertial Measurement Unit (IMU) di bordo. Questo dispositivo è in grado di misurare i ratei di accelerazione e di rotazione dell’elicottero. Integrando queste informazioni con il tempo, è possibile stimare la sua posizione, la velocità e l’attitudine, ovvero il suo orientamento spaziale durante il volo. Il sistema di controllo del volo di bordo reagisce ai movimenti rilevati dall’IMU inviando i relativi impulsi al sistema che governa le pale dell’elicottero, a una velocità di 500 volte al secondo.
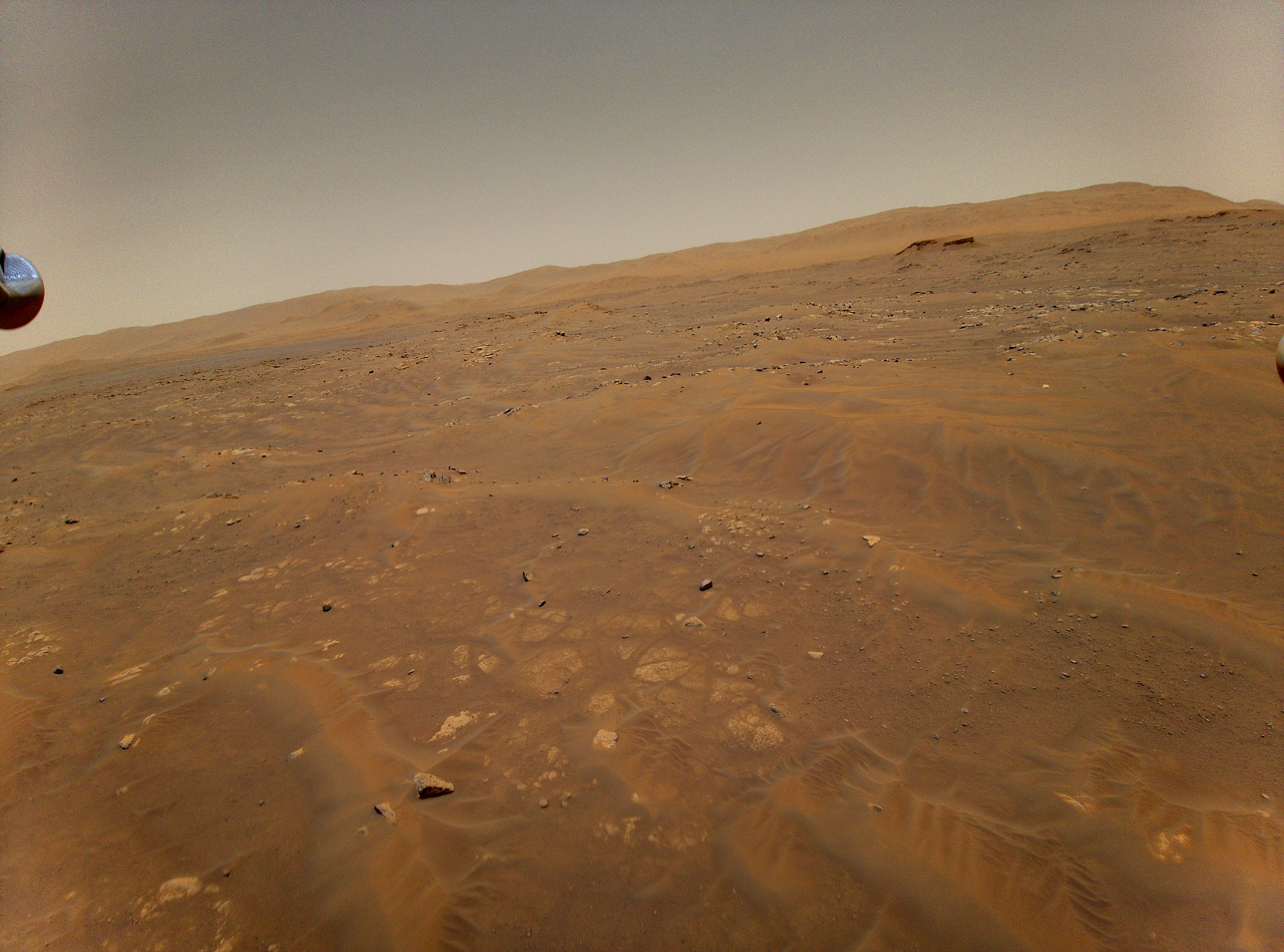
Tuttavia, se il sistema di navigazione facesse affidamento solamente alla sola IMU, esso non riuscirebbe a funzionare con l’accuratezza necessaria nel caso di lunghi tratti di volo perché gli errori si accumulerebbero molto rapidamente e l’elicottero si smarrirebbe. Pertanto, per mantenere la migliore accuratezza nel tempo, le stime fornite dall’IMU vengono corrette in continuazione grazie alla fotocamera di navigazione di cui è dotato Ingenuity. Per la maggior parte del tempo d volo, la fotocamera di navigazione, la quale punta verso il basso, scatta trenta immagini al secondo della superficie marziana e le invia al sistema di navigazione del drone. Per ogni immagine l’algoritmo del sistema di navigazione esegue una serie di operazioni: all’inizio esamina la marcatura temporale (timestamp) che è allegata a ogni immagine al fine di determinare quando è stata acquisita. Di seguito, l’algoritmo fa una previsione su ciò che la fotocamera avrebbe dovuto osservare in quel determinato momento, in termini di caratteristiche della superficie che può riconoscere dalle immagini precedenti, scattate pochi istanti prima nella fattispecie, variazioni di colore del terreno e protuberanze come sassi e increspatura nella sabbia. Infine, l’algoritmo di navigazione determina dove queste caratteristiche appaiono effettivamente nell’immagine. Il software utilizza le differenze fra la posizione predetta e quella effettiva della caratteristica del suolo presa in considerazione.
L’anomalia
Il volo era iniziato approssimativamente da 54 secondi, quando c’è stato un problema nel flusso delle immagini inviate dalla fotocamera di navigazione. Questo intoppo ha comportato la perdita di una singola immagine ma, cosa più importante, ha comportato il fatto che le seguenti immagini riprese venissero inviate al sistema di navigazione con una marcatura temporale inaccurata. Da quel momento in avanti, ogni volta che l’algoritmo di navigazione eseguiva una correzione basata su una delle immagini inviate dalla fotocamera, lo faceva sulla base di informazioni poco precise costringendo il sistema a correggere le misure della posizione in continuazione, per eliminare gli errori “fantasma”. Le conseguenze ultime di tutta questa attività, sono state le oscillazioni dell’elicottero.

Il superamento dell’anomalia
Nonostante quanto accaduto, Ingenuity è stato in grado di continuare e portare a termine il suo volo, atterrando in sicurezza a circa 5 metri dalla zona prefissata. Una delle principali ragioni per cui è riuscito a completare l’operazione, risiede nel considerevole sforzo che è stato fatto per fare in modo che il sistema di controllo del volo dell’elicottero avesse un ampio “margine di stabilità”: Ingenuity è stato progettato anche per tollerare errori significativi mantenendo la stabilità, includendo anche gli errori nella sequenza temporale. Questo margine integrato non era completamente necessario nei voli precedenti, perché il comportamento del velivolo era in linea con le aspettative del team di controllo, ma è stato molto d’aiuto nel sesto volo.
Un’altra decisione a livello progettuale è stata molto importante al fine di aiutare Ingenuity ad atterrare in sicurezza. Era stato optato in precedenza di cessare l’utilizzo delle immagini della fotocamera di navigazione durante la fase finale della discesa fino all’atterraggio, per fare in modo di avere delle stime dei movimenti del drone più continue e più sicure durante questa fase critica del volo. Proprio questa variante progettuale ha avuto il suo ritorno positivo durante il sesto volo: Ingenuity ha ignorato le immagini catturate dalla fotocamera durante le fasi terminali del volo, ha smesso di oscillare, ha stabilizzato la propria attitudine ed è atterrato alla velocità prevista.
Effettuando una valutazione complessiva del Flight Six, è corretto affermare che esso si è concluso con Ingenuity posato in maniera sicura al suolo perché un determinato numero di sottosistemi, come il sistema del rotore, gli attuatori, e il sistema di alimentazione elettrico, hanno risposto a un’aumentata richiesta di intervento al fine di mantenere e proseguire il volo dell’elicottero, anche in presenza di errori nel sistema di navigazione. Analizzando gli eventi un poco più da vicino, gli ingegneri della NASA ritengono che Ingenuity abbia affrontato e superato la situazione imprevista nella maniera migliore; tuttavia se da un lato è vero che si è palesata una vulnerabilità imprevista relativamente all’acquisizione delle marcature temporali delle immagini, che dovrà quindi essere analizzata a fondo dal team che gestisce le operazioni del drone, dall’altro lato è stata confermata in maniera molteplice la robustezza progettuale dell’intero sistema.

In conclusione, nonostante questo sesto e complicato volo di Ingenuity non si sia svolto come inizialmente pianificato, NASA ha ottenuto incidentalmente dei dati utili sui limiti estremi dell’inviluppo di volo e sulle performance dell’elicottero. Questi dati verranno attentamente analizzati prossimamente, per espandere le conoscenze sull’operatività degli elicotteri su Marte.
Fonte: NASA
 Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
