






ReachBot, lo studio per una missione robotica in una caverna marziana

NASA ha recentemente dato il via libera alla prima fase di sviluppo di un robot per l’esplorazione delle caverne marziane innovativo, ad alta mobilità e dotato di bracci estensibili con cui aggrapparsi.
Sulla Terra grotte e caverne sono libri aperti sul passato geologico del nostro pianeta e con il ritorno d’interesse verso l’esplorazione di altri corpi celesti: Luna, Marte, comete e asteroidi, l’accesso al loro sottosuolo avrebbe un notevole ritorno scientifico per comprendere il passato del nostro sistema solare. Recentemente abbiamo parlato della pianificazione per una futura missione robotica europea per lo studio di un tunnel di lava lunare e ora trattiamo un progetto simile da parte statunitense, con un importante contributo italiano.
Lo studio è stato incluso nel programma NASA Innovative Advanced Concepts (NIAC) 2021, realizzato per finanziare idee visionarie che potrebbero trasformarsi in missioni vere e proprie, proponendo concetti nuovi, credibili e talmente avanzati da cambiare i paradigmi del settore aerospaziale.
ReachBot, ideato da un team dell’Autonomous Systems Laboratory (ASL) dell’Università di Stanford, in California, e diretto dal prof. Marco Pavone, del dipartimento di aeronautica e astronautica, sarà dotato di bracci estensibili arrotolabili e configurabili in base all’utilizzo, che gli consentiranno di:
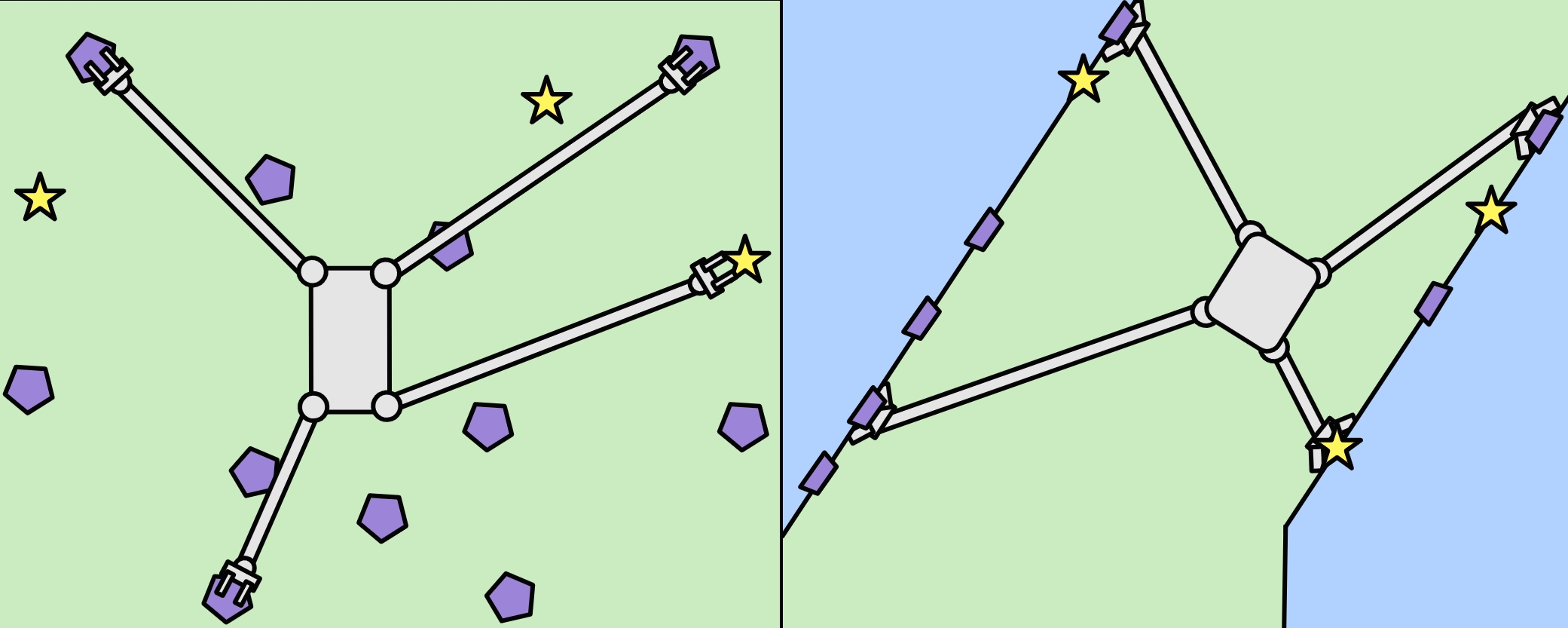
- avanzare strisciando o arrampicando, aggrappandosi in sequenza ad appigli posti anche a distanza;
- quando aggrappato, muoversi in diverse direzioni e superare ostacoli allungando e accorciando appositamente i bracci;
- applicare forze, coppia, leve e trazione ai punti di ancoraggio.
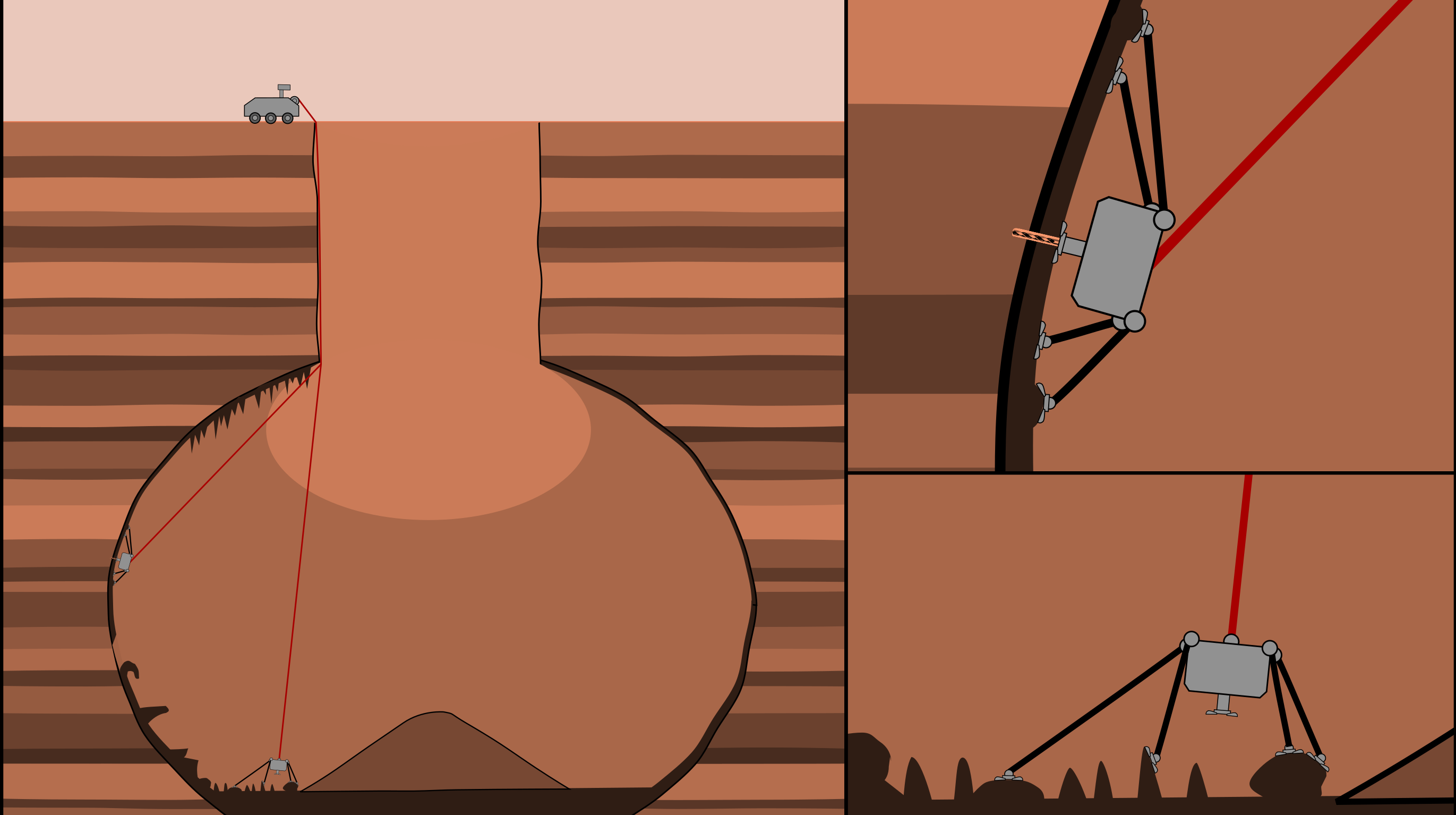
Queste caratteristiche consentiranno al piccolo robot di ottenere una notevole versatilità nel movimento e interazione con l’ambiente marziano circostante, con le sue grotte, fratture geologiche, dirupi e fosse. Il team dell’ASL non esclude comunque altri utilizzi, quali per esempio la manutenzione, costruzione e logistica all’interno o all’esterno di stazioni spaziali, sulla Luna o altri corpi celesti più piccoli.
«ReachBot introduce un nuovo paradigma per quanto riguarda mobilità e manipolazione e le sue potenziali applicazioni in ambiente spaziale sono molteplici», ci hanno spiegato Andrew Bylard e Stephanie Schneider dell’ASL di Stanford, con cui abbiamo preso contatto. «In particolare sarà perfetto per ambienti in microgravità, gravità ridotta o laddove la gravità tenderà ad allontanare il robot dalla superficie di interesse, come pareti verticali e a strapiombo».
I bracci estensibili arrotolabili
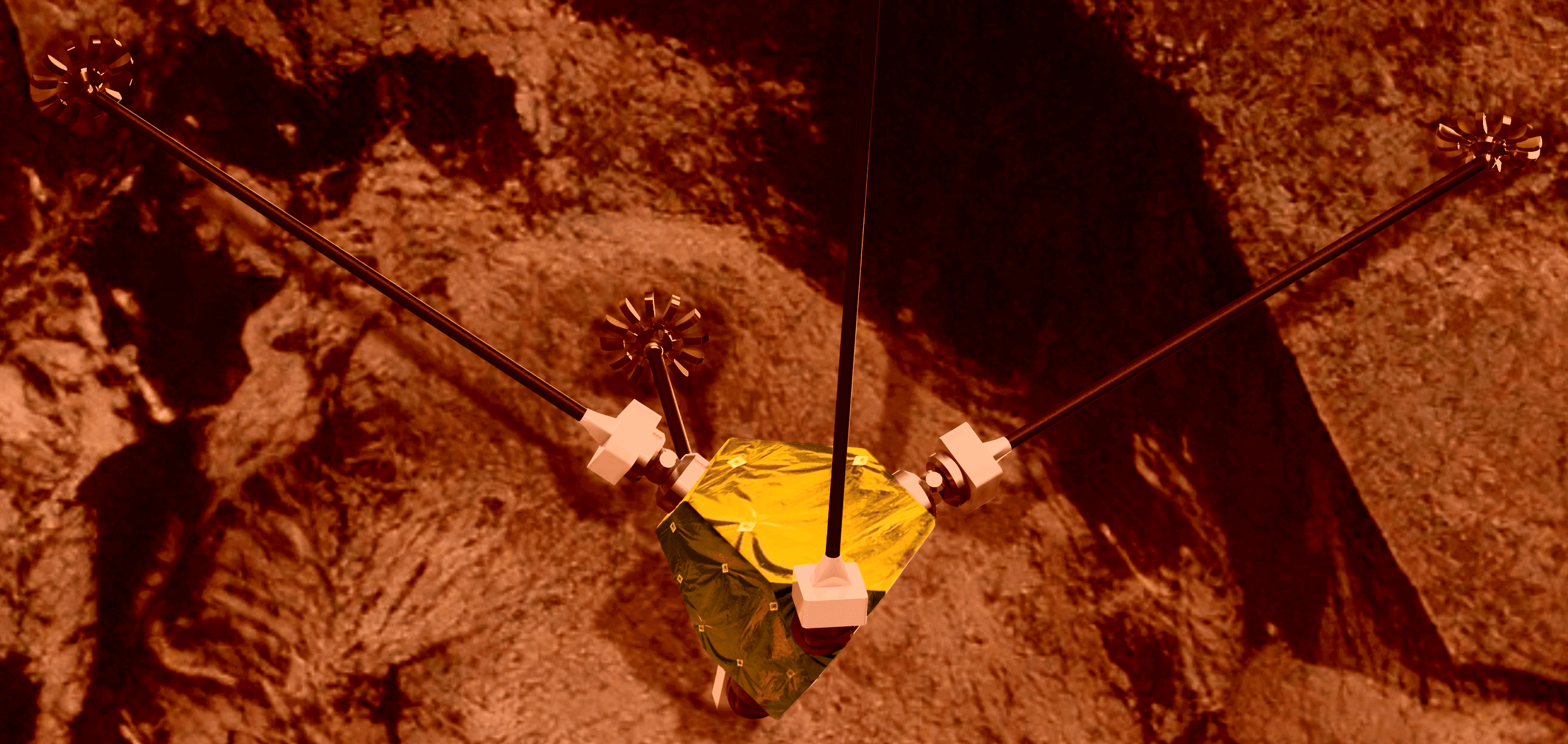
Per garantire al ReachBot una capacità di movimento in parete, con un ampio campo d’azione e nello stesso momento utilizzare strumenti o accessori, i progettisti hanno scelto di dotarlo di diversi bracci estensibili e arrotolabili. Si tratta di un nastro metallico o in materiale composito, quindi molto leggero, che srotolandosi va a formare un cilindro cavo, dotato quindi di una certa stabilità strutturale, con la possibilità di avere all’estremità un sistema prensile, una telecamera, un campionatore o altri strumenti scientifici.
Per effettuare i primi test dinamici di laboratorio, senza però realizzare un robot completo, il team dell’ASL sta utilizzando alcuni sistemi dell’azienda britannica Rolatube, con spessore del nastro di 3 mm, diametro del tubo formato di 7 cm ed estensioni di 1 e 2 metri. Al nastro è accoppiato un sistema motorizzato di dispiegamento e riavvolgimento.
«Quanto si estenderanno i bracci? Questo dipenderà da vari fattori», puntualizza Bylard. «Lo spazio disponibile all’interno del robot per il sistema di estensione compreso del nastro arrotolato, la massa del carico all’estremità e l’angolo di estensione. Naturalmente, nel caso di operazioni in microgravità, la massa non sarà un problema e sarà solo un problema di volume».

In collaborazione con il Biomimetics and Dexterous Manipulation Lab, il team sta sviluppando un sistema di presa gripper posizionato all’estremità dei bracci e ispirato alle zampe degli uccelli. Il sistema gripper sarà molto leggero, dotato di due o più dita provviste di micro spine a molla per adattarsi a qualsiasi superficie irregolare e in grado di applicare forze in differenti direzioni.
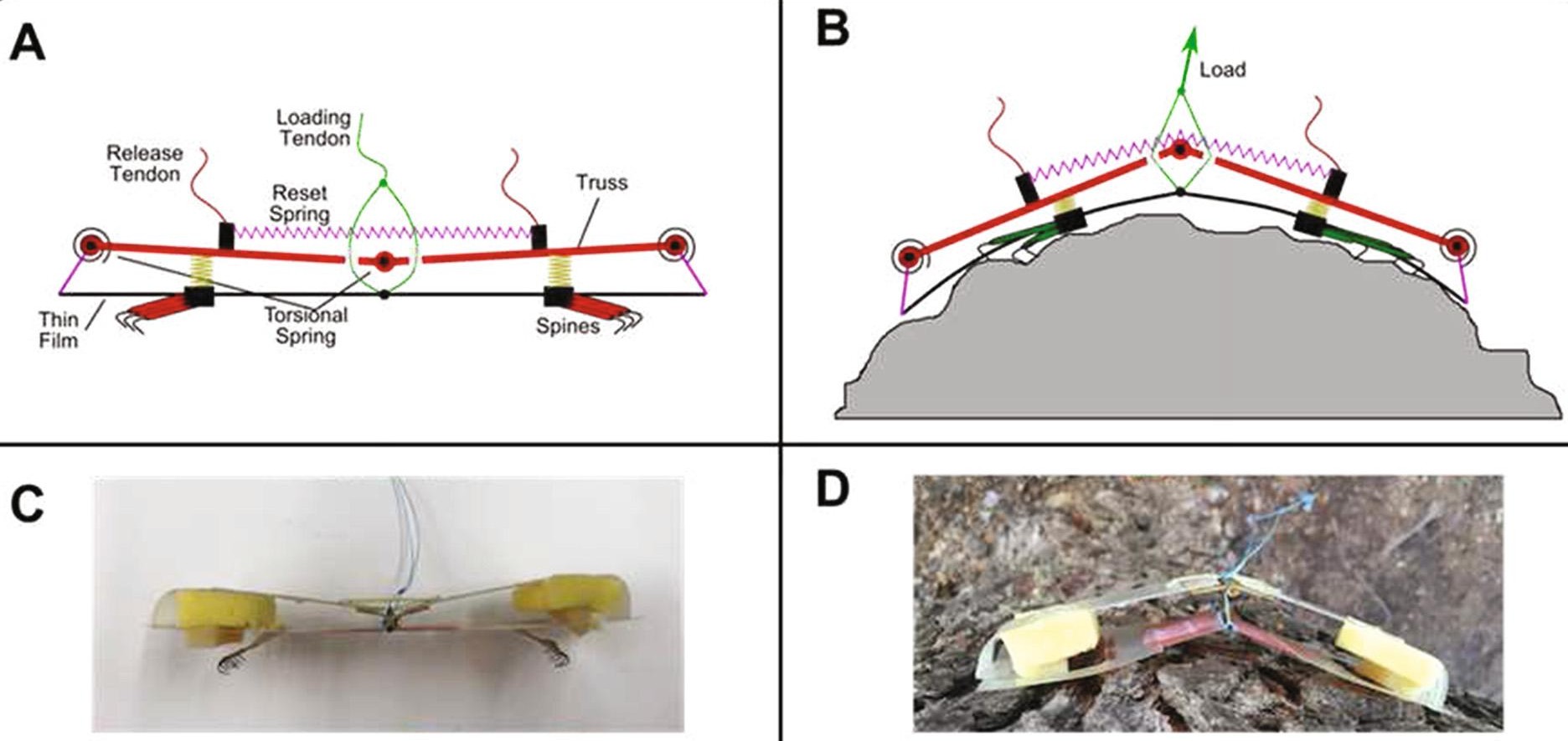
A Stanford lo studio dei gripper dotati di spine non è certo una novità, qui un video del 2010 riguardante il robot Spinybot II e le sue zampe che gli permettono di arrampicarsi agevolmente su differenti tipi di muri.
Altre caratteristiche
Per monitorare l’ambiente circostante e raccogliere dati ReachBot sarà dotato di alcune videocamere e una fonte di illuminazione, un sistema di navigazione all’infrarosso, una camera multispettro ad alta risoluzione (derivata dalla Mastcam-Z del rover Perseverance), un microscopio dotato di CCD, uno spettrometro iperspettrale per analisi mineralogiche, uno spettrometro Raman per rilevare eventuali molecole organiche e uno spettrometro all’infrarosso (derivato da Sherloc, Watson e Pixl di Perseverance). Inoltre il robot potrebbe ospitare un trapano di superficie e un sistema di raccolta e stivaggio di campioni per un futuro ritorno a Terra.
L’alimentazione di energia e il traffico dati sarà garantito tramite un cavo ombelicale gestito da un rover sulla superficie. Non è escluso che il cavo possa essere anche progettato per sostenere il peso del ReachBot, agevolando quindi alcune manovre e spostamenti sulla verticale.
Per il loro alto potenziale scientifico, due siti geologici marziani sono stati individuati come candidati per una futura esplorazione: la Huo Hsing Vallis e la Deuteronilus Mensae. Entrambi risalgono al periodo Noachiano (4,1–3,7 miliardi di anni fa), la seconda delle 4 ere geologiche di Marte e la più interessante dal punto di vista scientifico per la notevole presenza di acqua sulla superficie.
Lo stato attuale del progetto
Prima di realizzare un prototipo intero funzionante, il team si sta concentrando sui vari componenti tra cui, oltre al sopracitato sistema di bracci e gripper, anche il software di controllo dei movimenti. Questo software, mappando l’ambiente delle operazioni e ricevendo da Terra gli obbiettivi da raggiungere, dovrà stabilire il percorso migliore e più sicuro per il robot, selezionando tutti gli appigli ottimali e la sequenza con cui ancorarsi. Il progetto prevede che ReachBot, utilizzi uno dei suoi bracci per saggiare la resistenza di ciascun appiglio prima di abbandonarne un altro, mantenendo quindi sempre una stabilità certa.
Fonte: Autonomous Systems Laboratory, NASA
 Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
