






L’agenzia spaziale canadese affida alla MDA corporation la realizzazione del Canadarm3

La Canadian Space Agency (CSA) ha ufficialmente confermato l’inizio dello sviluppo del nuovo braccio robotico Canadarm3.
Come prevedibile, la MDA Corporation è stata scelta per questo importante incarico in quanto maggiore industria canadese in ambito aerospaziale. MDA è nota per la realizzazione del Canadarm (il braccio robotico utilizzato a bordo degli Shuttle sin dal 1981 e utilizzato in ben 90 missioni), del Canadarm2 (attualmente in uso sulla ISS da ormai 20 anni) e del sistema Dextre, la “mano robotica” (anch’essa utilizzata sulla ISS) costruita nel 2008.
L’azienda vanta 24.000 ore di esperienza nelle operazioni robotiche dirette e oltre tre milioni di ore di supporto tecnico durante gli interventi in orbita, con una percentuale di successo del 100%.
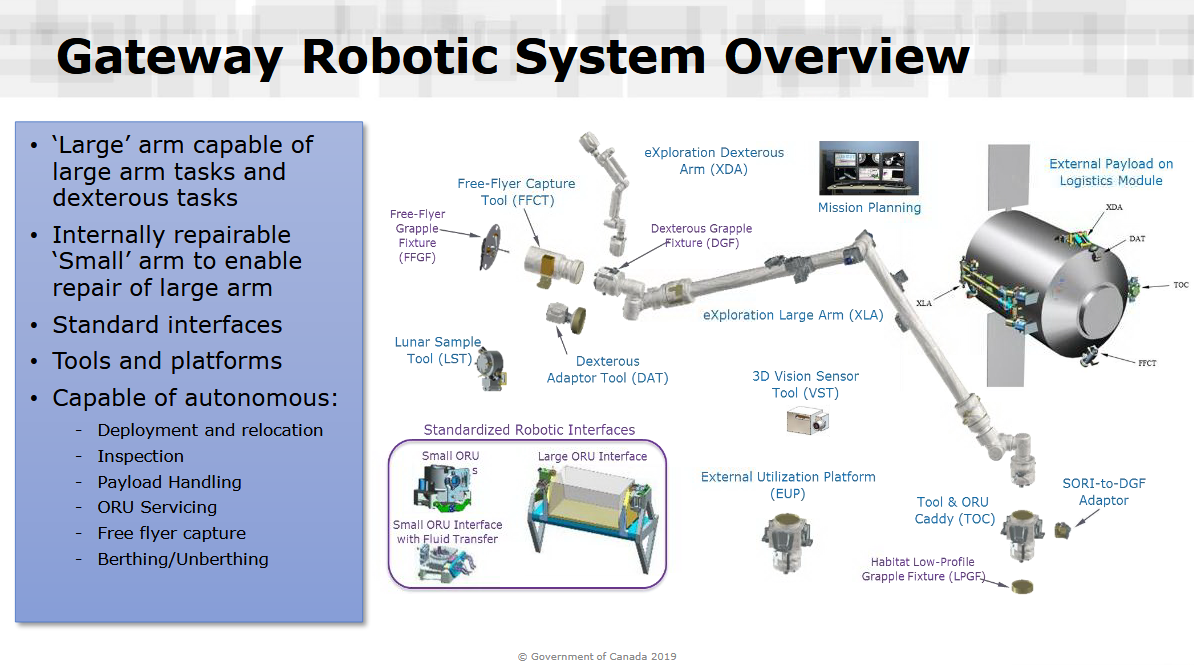
Era quindi più che probabile che la realizzazione del Canadarm3 (più precisamente Exploration Large Arm – XLA) venisse affidata proprio alla MDA Corporation.
Canadarm3 diventerà uno degli elementi principali del Lunar Gateway, la prossima stazione spaziale internazionale che sarà posizionata in orbita cislunare.
Con l’inizio ufficiale di questa commessa dal valore di 22,8 milioni di dollari canadesi, si avvia ufficialmente la Fase A dello sviluppo, cioè la definizione di tutti i requisiti tecnici necessari alla realizzazione del progetto XLA.
In questa fase si validano anche tutti i concept design individuati nella precedente Fase 0 e si certifica la disponibilità di tutte le tecnologie necessarie alla realizzazione. Le fasi successive, da confermare di volta in volta, sono la Fase B (progettazione preliminare), la Fase C (progettazione finale) e la Fase D (produzione, integrazione e test).
MDA Corporation non si occuperà solo del nuovo braccio robotico, ma anche di tutti i sistemi correlati. Sarà infatti realizzato anche l’eXploration Dexterous Arm (XDA), evoluzione ridimensionata della sua controparte Dextre. Sarà di sua diretta competenza anche la costruzione di tutta la strumentazione utile per l’esecuzione delle operazioni di manutenzione e di supporto alle attività scientifiche. Si aggiungono anche l’integrazione e la realizzazione di tutti i sottosistemi, come le telecamere, gli adattatori, i software e la direzione di tutte le procedure operative.
L’utilizzo intensivo dell’intelligenza artificiale
La partecipazione attiva dei bracci robotici alla costruzione e alla manutenzione della Stazione Spaziale è forse la caratteristica principale che li contraddistingue. Già dal primo Canadarm a bordo degli Shuttle sono state innumerevoli le volte in cui si è trovato in questi strumenti un mezzo insostituibile per portare a termine i compiti previsti. Molte delle operazioni di routine che richiederebbero un’attività extraveicolare trovano nella manipolazione robotica un sostituto preziosissimo, capace di far risparmiare tempo lavoro agli astronauti per dedicarlo alle attività di ricerca scientifica.
Le mansioni in cui sarà coinvolto il Canadarm3 saranno fondamentalmente le stesse di cui si sta attualmente occupando il suo progenitore a bordo della ISS. Ma la novità particolarmente interessante è che la maggior parte delle operazioni che Canadarm3 sarà chiamato a svolgere avverranno in maniera autonoma.
La realizzazione di un sistema capace di gestirsi in autonomia si rende necessaria in quanto il Lunar Gateway verrà assemblato a circa 400.000 chilometri dalla Terra, una distanza che introduce un ritardo delle comunicazioni di circa 3 secondi (tempo di andata e ritorno). Possono sembrare pochi, ma, se posti nel contesto di operazioni robotiche complesse all’esterno di una stazione spaziale abitata, diventano un tempo di attesa piuttosto lungo.
Come elemento cardine di questo nuovo approccio verrà sviluppato un sistema evoluto dell’attuale Advanced Space Vision System, una tecnologia che permette di riconoscere gli oggetti e la loro posizione nello spazio grazie a marcatori ottici, integrandolo con telecamere, visori e software di rilevazione ottica in 3D. Ad aumentare maggiormente la sicurezza complessiva del sistema verrà implementato un sistema automatico di prevenzione delle collisioni.
Similitudini e differenze tra Canadarm3 e il suo fratello maggiore in orbita bassa
A una prima occhiata Canadarm3 sembrerà molto simile alla sua controparte al lavoro sulla ISS. Entrambi condividono la stessa fisionomia, con un totale di sette giunti che già ora donano una grande mobilità. Il grado di rotazione però verrà aumentato a 360° per giunto nel Canadarm3, contro gli attuali 270° del Canadarm2.
Come il suo gemello in orbita bassa, sara dotato di un sistema di force feedback, una tecnologia che permette di “sentire” direttamente sui comandi manuali utilizzati dagli astronauti a bordo del Lunar Gateway un ritorno tattile che replica non solo l’avvenuta presa dell’oggetto, ma anche il suo spostamento inerziale in fase di manipolazione.
Altre differenze sono dettate anche dal contesto in cui andrà a operare il nuovo braccio robotico. Il Lunar Gateway avrà dimensioni molto ridotte rispetto alla ISS e similarmente il Canadarm3 avrà una lunghezza di 8,5 metri contro i 17 del Canadarm2, ma non è solo questa la ragione della sua compattezza.
Così come sarà difficile manovrare a distanza uno strumento in orbita cislunare, allo stesso modo sarà difficoltoso ripararlo come si è potuto fare finora, ovvero direttamente a Terra tra una missione e l’altra (nel caso dei Canadarm a bordo degli Shuttle), o inviando pezzi di ricambio da sostituire con delle EVA (come sulla ISS, grazie alla presenza continuativa di astronauti a bordo).
Per questo Canadarm3 sarà in grado di separare da solo le proprie parti, sia per sostituirle in autonomia con nuovi componenti senza il supporto di attività extraveicolari, sia (quando possibile) per riparazioni da parte di astronauti da effettuare all’interno dell’area abitabile del Lunar Gateway. Ecco perché le dimensioni contenute si dimostreranno vantaggiose.
Per muoversi all’esterno del Lunar Gateway Canadarm3 adotterà lo stesso sistema usato oggi sulla ISS: entrambe le estremità del braccio saranno dotate di un Latching End Effector, un meccanismo di presa basato su tiranti che si agganciano a delle apposite basi di supporto, che forniscono anche una linea di alimentazione di energia e trasmissione dati (telemetria, sensoristica, video) necessaria al funzionamento del braccio. Chiamate PDGF (Power Data Grapple Fixtures), queste basi verranno installate in diversi punti all’esterno del Lunar Gateway; così, passando da una all’altra, il braccio potrà raggiungere la sua zona di lavoro. Anche l’eXploration Dexterous Arm avrà la capacità di sfruttare i PDGF in configurazione da “solista”, offrendo la possibilità di lavorare in tandem con il braccio robotico.
Il valore strategico dell’impresa e le nuove conferme
Saranno molti i vantaggi industriali, tecnologici ed economici derivanti dall’investimento nel sistema Exploration Large Arm.
Dopo una serie di operazioni spaziali condotte in vari programmi per quasi 40 anni, Canadarm3 rafforzerà ulteriormente la presenza del Canada nella robotica spaziale operativa: un’area di business che si prevede possa generare ricavi di 7 miliardi di dollari canadesi nei prossimi 10 anni.
Il prestigio ottenuto con questa politica di ricerca e innovazione ha portato già i suoi primi frutti. Infatti, è stato da poco annunciato dalla CSA che un astronauta canadese prenderà parte a una missione lunare nell’ambito del programma Artemis. Nello specifico durante la fase Artemis 2, che prevede una missione di prova con equipaggio in orbita lunare entro il 2023.
«Sono orgoglioso di annunciare un altro primato: il Canada si unirà agli Stati Uniti per la prima missione con equipaggio sulla Luna dopo la missione Apollo. Questo renderà il Canada il secondo paese dopo gli Stati Uniti ad avere un astronauta nello spazio profondo», ha detto in una conferenza stampa il ministro canadese per l’innovazione, la scienza e l’industria Navdeep Bains.
Non è stato ancora comunicato il nome dell’astronauta che prenderà parte alla missione.
Fonte notizia: Canadian Space Agency
 Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
