


Grande e inaspettato successo di partecipazione per la richiesta di aiuto da parte dell’agenzia spaziale statunitense a progettare il prossimo rover meccanico per l’esplorazione di Venere.
Lo scorso 6 luglio sono stati annunciati i tre progetti vincitori dell’inusuale bando pubblico Exploring Hell: Avoiding Obstacles on a Clockwork Rover, indetto dal Jet Propulsion Laboratory (JPL) di Pasadena, in California, sotto l’egida del programma NASA Innovative Advanced Concepts, che ha ricevuto ben 572 proposte da 82 paesi e di cui avevamo parlato in un articolo lo scorso febbraio.
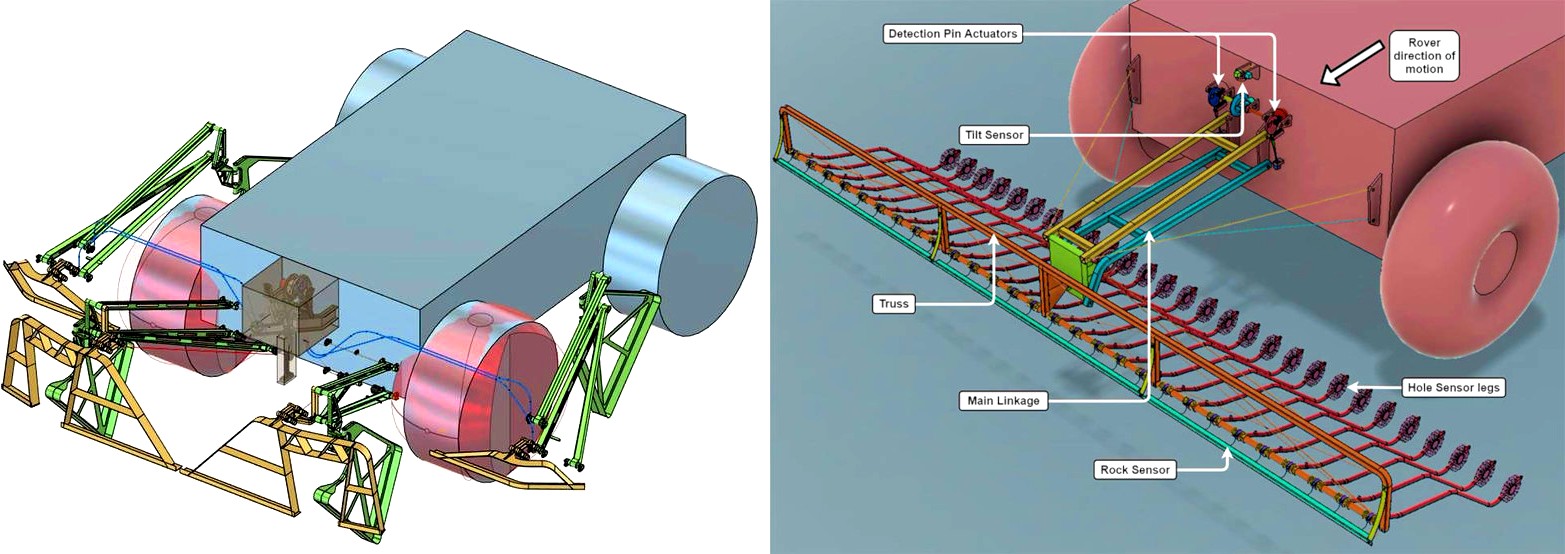
La sfida proposta era quella di progettare, rispettando alcuni parametri quali massa, dimensioni, energia elettrica necessaria e limiti di operatività, un sensore meccanico per la rilevazione di ostacoli da installare sul rover meccanico AREE (Automaton Rover for Extreme Environments).
Alimentato a energia eolica e quasi completamente meccanico per sopravvivere alcuni mesi alle estreme condizioni ambientali di Venere (temperatura di oltre 450 °C, pressione superiore alle 90 atmosfere e nubi di acido solforico) AREE dovrà essere in grado di individuare e aggirare autonomamente eventuali ostacoli sul suo percorso (rocce, fossi e terreni inclinati) per poter proseguire con l’esplorazione della superficie.
«La risposta da tutto il mondo è stata incredibile e molto al di sopra delle nostre aspettative», ha affermato Jonathan Sauder, responsabile del programma AREE al JPL. «Ci sono state così tante ottime idee e progetti ben sviluppati che, oltre ai premi stabiliti, abbiamo deciso di premiare due ulteriori proposte e menzionarne altre dieci per onorare l’indiscutibile impegno profuso nel lavoro di progettazione».

La proposta vincitrice del bando, aggiudicandosi i 15.000 $ in palio, è risultata la Venus Feelers del giovane architetto egiziano Youssef Ghali del Cairo, che si definisce un ideatore, produttore e realizzatore di prodotti innovativi che derivano l’aspetto estetico dalla funzionalità.
Il progetto Skid n’ Bump, proposto dal Team Rovetronics statunitense formato da Martin Grabau e Eric Seeberger, si è aggiudicato i 10.000 $ del secondo posto, mentre i 5.000 $ del terzo gradino del podio sono stati assegnati a Callum Heron, australiano di Brisbane, con il suo Direction Biased Obstacle Sensor (DBOS).
Come già detto il JPL ha voluto premiare inoltre, con 2.000 $ ciascuno, due ulteriori proposte: il progetto AMII Sensor della compagnia KOB ART di Riga in Lettonia, come miglior prototipo e ECHOS (Evaluate Cliffs Holes Objects & Slopes) di Matthew Reynolds di York in Gran Bretagna, come progetto più innovativo.
Le dieci proposte che si sono meritate il titolo di Honorable Mentions sono:
- CATS Cable Actuated Tactile Sensor, del team Spaceship EAC
- Mechanical Logic Obstacle Avoidance Sensor, di Christopher Wakefield
- Clockwork Cucaracha, di Michael Sandstrom
- Vibrissae Inspired Mechanical Avoidance Sensor, di ARChaic Team
- V-Track with Scotch Yoke Clinometer – Prototype, di Jason McCallister
- SPIDER (Sense, Perceive, ID in Exploration Rover), di Ryan Zacheree Lewis
- The Double Octopus, di Thomas Schmidt
- Mechanical Sensor for Avoiding Compound Obstacles, di Aurelian Zapciu
- DEMoN Fire Sensor, di Santiago Forcada Pardo
- Cane and Able, di Martin Holmes
Naturalmente rispetto ai premi in denaro o il titolo meritato, l’onore più grande per gli ideatori di questi 15 progetti sarà eventualmente di vedere realizzata e incorporata la propria proposta, o parte di essa, sul rover AREE e, vedendolo in azione sulla superficie di Venere, sentirsi parte di una missione interplanetaria.
Fonte e foto credit: NASA.
![]()
