






NASA annuncia i vincitori del bando per il rover meccanico venusiano AREE
Grande e inaspettato successo di partecipazione per la richiesta di aiuto da parte dell’agenzia spaziale statunitense a progettare il prossimo rover meccanico per l’esplorazione di Venere.
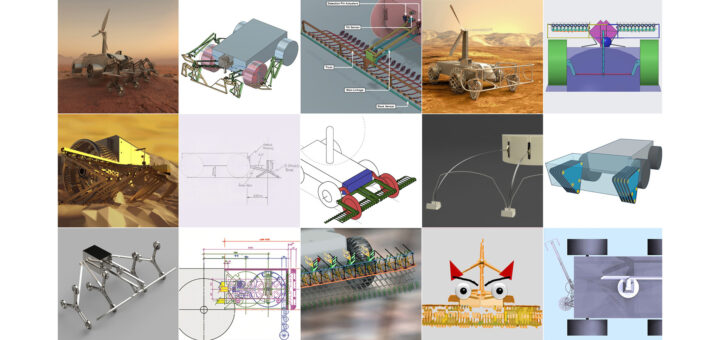
Lo scorso 6 luglio sono stati annunciati i tre progetti vincitori dell’inusuale bando pubblico Exploring Hell: Avoiding Obstacles on a Clockwork Rover, indetto dal Jet Propulsion Laboratory (JPL) di Pasadena, in California, sotto l’egida del programma NASA Innovative Advanced Concepts, che ha ricevuto ben 572 proposte da 82 paesi e di cui avevamo parlato in un articolo lo scorso febbraio.
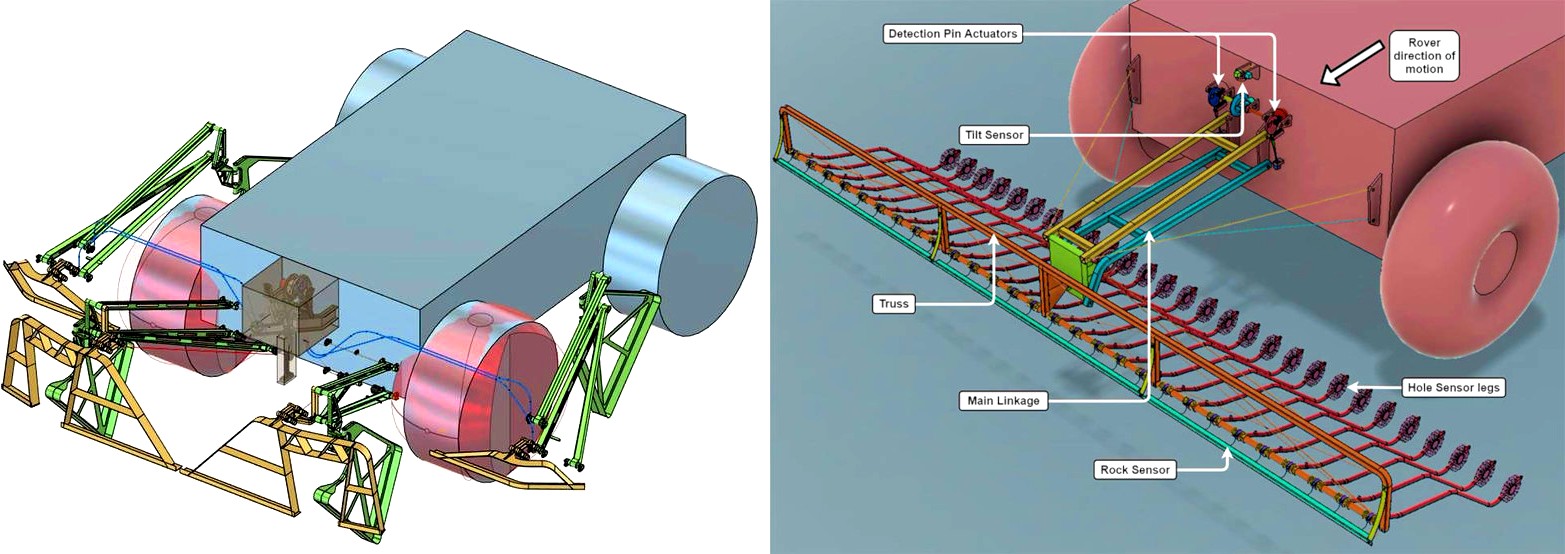
La sfida proposta era quella di progettare, rispettando alcuni parametri quali massa, dimensioni, energia elettrica necessaria e limiti di operatività, un sensore meccanico per la rilevazione di ostacoli da installare sul rover meccanico AREE (Automaton Rover for Extreme Environments).
Alimentato a energia eolica e quasi completamente meccanico per sopravvivere alcuni mesi alle estreme condizioni ambientali di Venere (temperatura di oltre 450 °C, pressione superiore alle 90 atmosfere e nubi di acido solforico) AREE dovrà essere in grado di individuare e aggirare autonomamente eventuali ostacoli sul suo percorso (rocce, fossi e terreni inclinati) per poter proseguire con l’esplorazione della superficie.
«La risposta da tutto il mondo è stata incredibile e molto al di sopra delle nostre aspettative», ha affermato Jonathan Sauder, responsabile del programma AREE al JPL. «Ci sono state così tante ottime idee e progetti ben sviluppati che, oltre ai premi stabiliti, abbiamo deciso di premiare due ulteriori proposte e menzionarne altre dieci per onorare l’indiscutibile impegno profuso nel lavoro di progettazione».
La proposta vincitrice del bando, aggiudicandosi i 15.000 $ in palio, è risultata la Venus Feelers del giovane architetto egiziano Youssef Ghali del Cairo, che si definisce un ideatore, produttore e realizzatore di prodotti innovativi che derivano l’aspetto estetico dalla funzionalità.
Il progetto Skid n’ Bump, proposto dal Team Rovetronics statunitense formato da Martin Grabau e Eric Seeberger, si è aggiudicato i 10.000 $ del secondo posto, mentre i 5.000 $ del terzo gradino del podio sono stati assegnati a Callum Heron, australiano di Brisbane, con il suo Direction Biased Obstacle Sensor (DBOS).
Come già detto il JPL ha voluto premiare inoltre, con 2.000 $ ciascuno, due ulteriori proposte: il progetto AMII Sensor della compagnia KOB ART di Riga in Lettonia, come miglior prototipo e ECHOS (Evaluate Cliffs Holes Objects & Slopes) di Matthew Reynolds di York in Gran Bretagna, come progetto più innovativo.
Le dieci proposte che si sono meritate il titolo di Honorable Mentions sono:
- CATS Cable Actuated Tactile Sensor, del team Spaceship EAC
- Mechanical Logic Obstacle Avoidance Sensor, di Christopher Wakefield
- Clockwork Cucaracha, di Michael Sandstrom
- Vibrissae Inspired Mechanical Avoidance Sensor, di ARChaic Team
- V-Track with Scotch Yoke Clinometer – Prototype, di Jason McCallister
- SPIDER (Sense, Perceive, ID in Exploration Rover), di Ryan Zacheree Lewis
- The Double Octopus, di Thomas Schmidt
- Mechanical Sensor for Avoiding Compound Obstacles, di Aurelian Zapciu
- DEMoN Fire Sensor, di Santiago Forcada Pardo
- Cane and Able, di Martin Holmes
Naturalmente rispetto ai premi in denaro o il titolo meritato, l’onore più grande per gli ideatori di questi 15 progetti sarà eventualmente di vedere realizzata e incorporata la propria proposta, o parte di essa, sul rover AREE e, vedendolo in azione sulla superficie di Venere, sentirsi parte di una missione interplanetaria.
Fonte e foto credit: NASA.
 Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Davvero particolari e interessanti questi rover meccanici!