


È trascorso ormai un anno e otto mesi dall’arrivo di InSight su Marte, a Elysium Planitia. Si tratta di una buona parte dei 709 Sol previsti per l’intera missione, e tuttavia il dispiegamento di uno dei sui principali strumenti, l’Heat Flow and Physical Properties Package (abbreviato in HP³), concepito per misurare la temperatura del sottosuolo di Marte, non è stato ancora completato. La cosiddetta “talpa”, il penetratore a percussione che avrebbe dovuto portare in profondità i sensori, giace tuttora a pochi millimetri dalla superficie e, nonostante qualche progresso abbia coronato gli sforzi del team dei tecnici capitanato dal principal investigator Tilman Spohn, il successo non sembra ancora a portata di mano.
Il “romanzo” della “talpa”
I lettori di AstronautiNEWS ricorderanno che le prime difficoltà del penetratore emersero poco dopo il posizionamento dello strumento sulla superficie antistante la sonda nel febbraio 2019, durante la prima sessione operativa. Dopo essere disceso per pochi centimetri il dispositivo si arrestò inclinandosi vistosamente. I tecnici a terra iniziarono un lungo lavoro di diagnosi dell’anomalia, riuscendo a escludere da subito quella che a un profano sarebbe parsa la spiegazione più probabile: la presenza di una roccia che la “talpa” meccanica non era in grado né di rompere né di aggirare.
Si trattava invece di un problema di attrito. Per scendere, il penetratore a percussione ha necessità di essere circondato e “sommerso” dal terreno, che in questo modo lo trattiene a ogni colpo impedendogli di rimbalzare indietro. Tuttavia la superficie del Pianeta Rosso, là dove InSight si è posata, sotto una sottile coltre di regolite presenta uno strato dalla struttura compatta, chiamato duricrust, di uno spessore (circa 20 cm, secondo le stime di Spohn) decisamente superiore a quanto fosse previsto. La “talpa” ha scavato e allargato un foro nel duricrust, che però non è in grado di collassare e quindi di riempirlo, e ha iniziato a rimbalzare a vuoto sul suo fondo inizialmente posto a circa 30 cm di profondità.
Comprendere la situazione ed elaborare una strategia di risoluzione ha richiesto più di tre mesi. Quella che in apparenza può essere ritenuta un’enormità di tempo va però valutata in relazione alla complessità della situazione e alla distanza. Test che hanno coinvolto anche il vicino sismometro SEIS, verifica dei risultati attendendo pazientemente le condizioni di luce ideali per le foto e la disponibilità dei satelliti in orbita marziana per il trasferimento dei dati, simulazioni a Terra delle possibili strategie risolutive utilizzando gli strumenti a disposizione al di là degli scopi per cui erano stati pensati: tutto ciò difficilmente poteva essere concluso con maggiore rapidità.
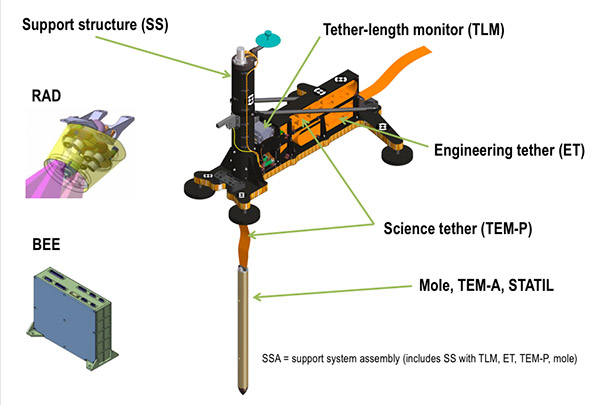
La soluzione inizialmente escogitata è stata quella di aiutare la “talpa” esercitando pressione sul terreno con la pala di cui è dotato il braccio robotico della sonda. La forza di 40/50 newton che l’arto meccanico poteva assicurare era stimata sufficiente a fornire al penetratore l’attrito mancante, se fosse stata esercitata nel punto giusto, nelle sue immediate vicinanze. Ciò richiedeva un’operazione delicatissima: la rimozione della struttura di supporto (Support System Assembly, SSA) che manteneva verticale il penetratore all’inizio della sua attività e ospitava il “cavo scientifico” con i sensori di temperatura che la talpa avrebbe dovuto trascinare dietro di sé, scendendo nel terreno.
Il braccio robotico ha svolto egregiamente questo compito nel giugno del 2019, evitando di danneggiare il cavo e soprattutto di far uscire la “talpa” dal terreno. La rimozione del supporto ha rivelato la presenza di un’ampia cavità, confermando visivamente ciò che i tecnici avevano dedotto dai dati a loro disposizione.
Tra il luglio e l’agosto dello scorso anno l’archivio delle immagini che la sonda trasmette regolarmente (e che tuttora vengono immediatamente pubblicate, a disposizione di tutti, sul sito della missione) ha iniziato a popolarsi di foto che mostravano sulla sabbia marziana attorno al penetratore le impronte via via prodotte dalla pressione della pala, esercitata sia con la punta che con la sua superficie piatta. Tutte queste spinte non hanno però prodotto, se non molto parzialmente, nemmeno il primo effetto sperato, ossia il collasso del terreno nel foro scavato dal penetratore, convincendo Spohn e i suoi collaboratori che quella tecnica non avrebbe potuto essere efficace in un tempo ragionevole.
Trascorso perciò un breve intervallo di inattività imposto dalla congiuzione solare (ossia il passaggio di Marte, lungo la sua orbita, dietro alla nostra stella, fenomeno che rendeva impossibili le comunicazioni radio con InSight), tra la fine di agosto e i primi di settembre 2019, si è optato per un approccio ancora più aggressivo e rischioso: usare la pala del braccio robotico per far pressione direttamente sul lato della “talpa” che ancora sporgeva dal terreno, onde fornire l’attrito necessario a riprendere la discesa.
L’inizio del tentativo è stato ritardato da un problema all’elettronica dello strumento HP³ (un’alterazione della memoria, probabilmente effetto dei raggi cosmici, ha reso necessario riavviare il sistema), ma il tempo di attesa è stato utilmente impiegato dai tecnici del braccio robotico per impratichirsi con la nuova tecnica. Esercitare una pressione il più possibile costante su un oggetto che si muove obliquamente (mentre il braccio dispone solo di movimenti orizzontali e verticali) evitando di danneggiarlo e di toccare il cavo con i sensori, non era certamente un’attività alla quale fossero preparati.
Solo in ottobre, perciò, dopo oltre sei mesi di inattività, il penetratore ha ripreso a percuotere il suolo, appoggiato alla pala del braccio robotico, e, con grande soddisfazione di tutto il team, è riuscito a scendere di circa cinque centimetri, provando a tutti che le ipotesi inizialmente formulate (la “talpa” era fermata dalla mancanza di attrito, non da una roccia impenetrabile) erano corrette.

Tuttavia, quasi fosse l’opera prevedibile di uno scrittore che alterna momenti in cui i protagonisti raggiungono i successi sperati ad altri in cui la fortuna si rovescia, anche il romanzo di InSight aveva in serbo un colpo di scena. Il 26 ottobre, proprio quando ci si aspettava che la “talpa” scomparisse nel terreno, la si è vista rimbalzare energicamente indietro, rischiando quasi di rovinare fuori dalla cavità. E dopo un nuovo tentativo di scavo, ancora assistito dal sostegno della pala, compiuto tra novembre e dicembre, l’inatteso rimbalzo si è ripetuto all’inizio del gennaio 2020.
Nel frattempo esigenze legate al programma e ai suoi costi avevano imposto una riduzione del personale impegnato nella missione. Secondo i progetti originari, dopo un anno dall’arrivo su Marte, il compito dei tecnici avrebbe dovuto essere il monitoraggio del regolare funzionamento della sonda e dei suoi sensori, e non certamente il troubleshooting di effetti imprevisti in operazioni mai pensate né tentate prima. La conseguenza è che le attività attorno alla “talpa” hanno dovuto essere rallentate, almeno di un fattore 2.
Per quanto ridotti nei numeri, gli uomini a disposizione di Spohn non erano certamente (e non lo sono tuttora) privi di tenacia e di risorse. Dichiarata fallita la tecnica del pinning (ossia della pressione laterale) si è passati a un intervento ancora più rischioso: usare la pala per spingere il retro del penetratore, in modo da aumentare la forza delle sue percussioni ed evitare le conseguenze di possibili altri rimbalzi.
Perché non si è fatto subito? Tutti coloro che hanno seguito con interesse le vicende di InSight già alle prime difficoltà avrebbero voluto essere su Marte per poter allungare la mano e spingere la “talpa” direttamente nel terreno. Ma, più ragionevolmente, i responsabili della missione hanno ritenuto più saggio sondare le altre strade disponibili che comportassero meno rischi. Si è cercato, per quanto possibile, di evitare di avvicinare l’estremità del braccio robotico al cavo che porta energia e dati al penetratore e che ospita i sensori. Solo la prospettiva di un inevitabile fallimento, unita alla maggiore confidenza acquisita nell’uso del braccio robotico, ha condotto alla mossa più azzardata.
Una strategia vincente?
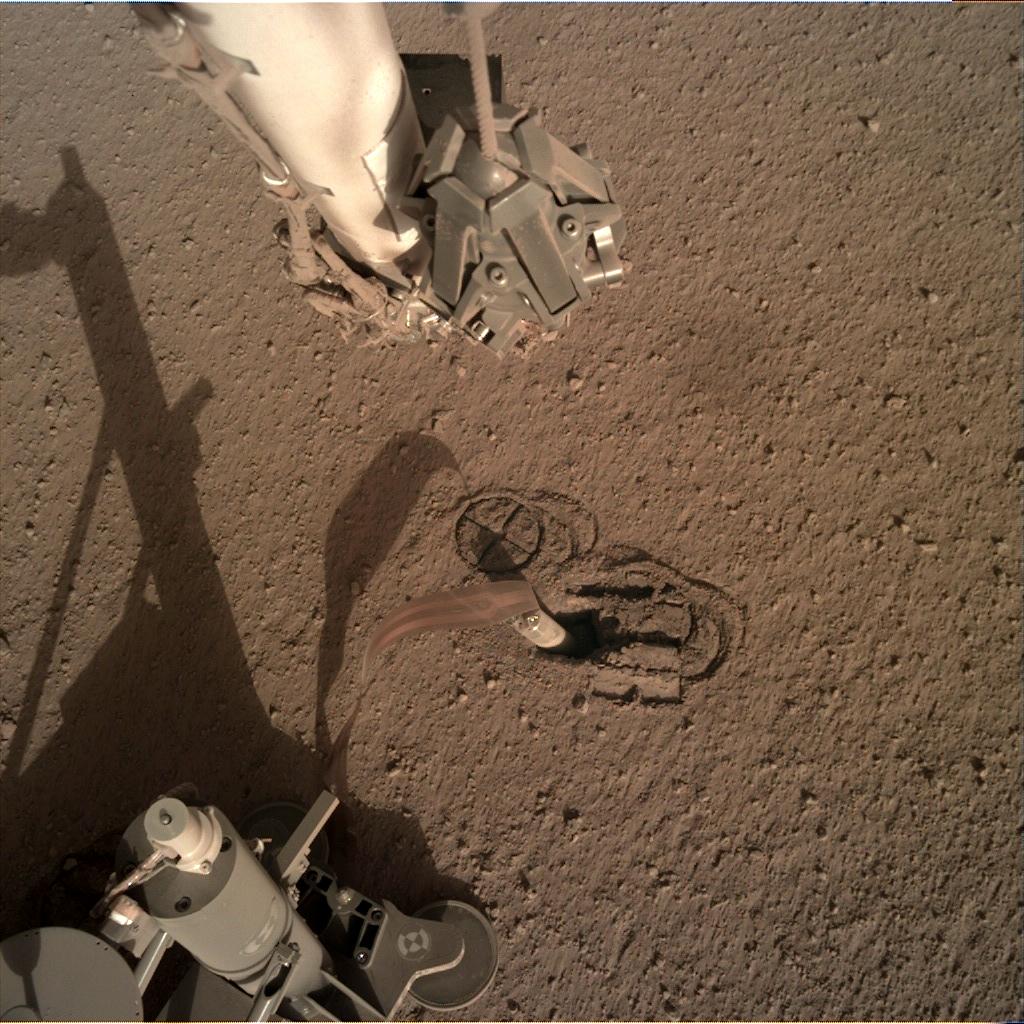
11 marzo 2020: la pandemia che dilaga nel mondo non ferma l’attività su InSight: le foto della camera IDC mostrano la pala del braccio robotico da qualche Sol stabilmente appoggiata sul bordo superiore del penetratore, in attesa che da terra giungano i comandi per riprendere gli scavi. Tra l’11 marzo (Sol 458) e il 30 maggio (Sol 536) sei cicli di percussione, condotti con molta prudenza e con meticoloso esame dei progressi compiuti dopo ogni passo, permettono alla “talpa” di guadagnare 7 cm e di sparire nella regolite, là dove la benna non sembra più in grado di aiutarla direttamente.


Ciò significa che il penetratore è pronto per procedere da solo, magari con l’aiuto della pressione che fino ad una certa profondità il braccio può ancora esercitare sul suolo, per compattarlo? È quanto i tecnici hanno chiamato il “free mole test” (il “test della talpa libera”), verifica che è stata oggetto di due sessioni di scavi, rispettivamente di 125 e 150 percussioni del penetratore, compiute il 13 e il 20 giugno (Sol 550 e 557). L’analisi dei risultati è ancora in corso, tuttavia le prime evidenze non sono del tutto incoraggianti. Se nella prima giornata la “talpa” ha potuto ancora beneficiare del contatto con la pala che schiacciava lo strato di regolite per avanzare almeno un po’ (ma proprio perché non era ancora “free”), nella seconda sembra che i progressi si siano arrestati e il penetratore abbia ripreso a rimbalzare indietro, urtando contro la superficie della pala.
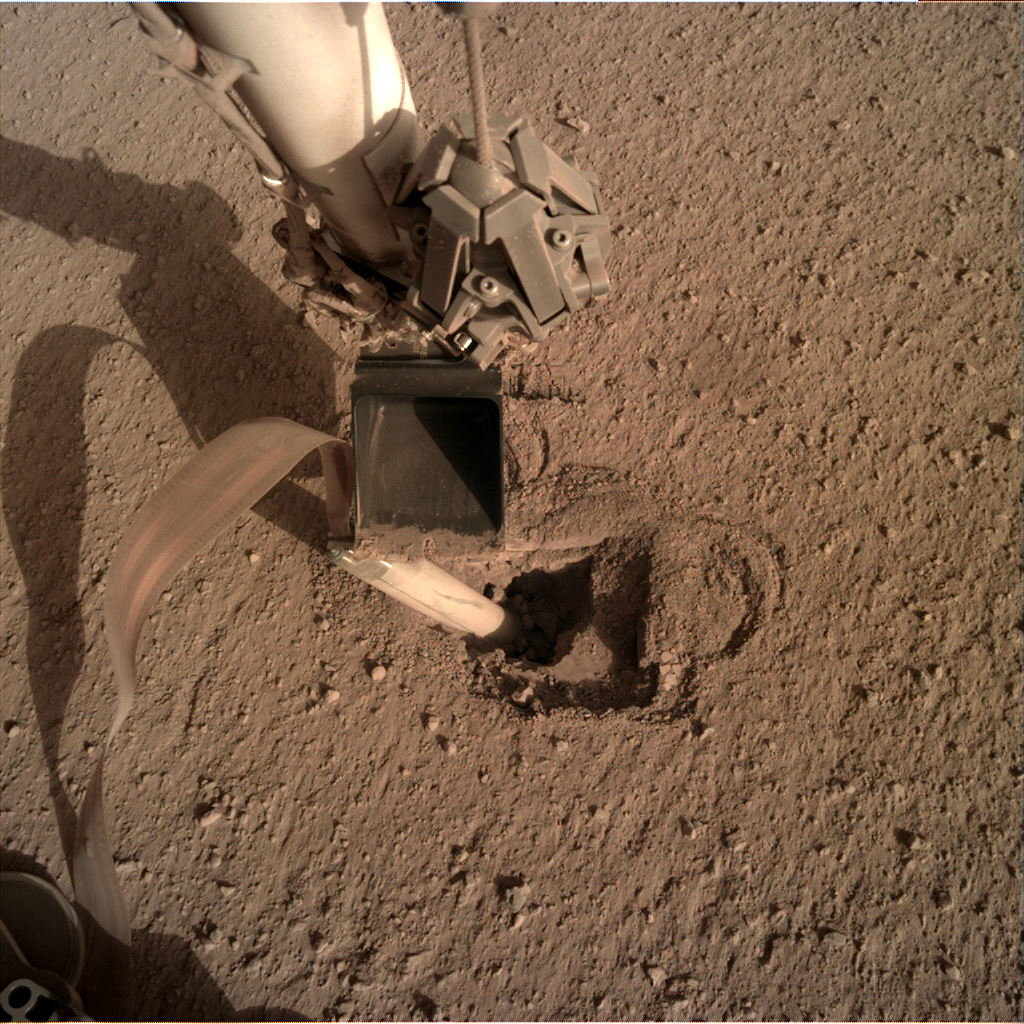
Così, nel suo blog, Tilman Spohn riassume quanto si può dedurre alle immagini che riportiamo sotto: «abbiamo dovuto concludere che avere la “talpa” più in basso di due-tre centimetri e sotto la superficie non garantisce l’attrito necessario, nonostante l’aiuto fornito dalla pressione sulla regolite. Il cavo si è mosso avanti e indietro e poi a sinistra, annullando gran parte dei progressi fatti da Sol 550. A metà dell’animazione si nota che le particelle di polvere hanno ripreso a muoversi. Due particelle sembrano addirittura saltare di qualche centimetro. Ma, a un esame più attento, è possibile vederle piuttosto spostarsi in avanti dall’interno della pala, in diversi fotogrammi. Il movimento delle particelle di polvere suggerisce che la “talpa” sia tornata su e stia colpendo da sotto il lato piatto della pala.»
Anche dopo questo ulteriore scacco i tentativi di portare il penetratore alla profondità minima di 10 piedi (circa 3 metri), necessaria perché lo strumento possa compiere i rilievi programmati, non si arresteranno. Proprio mentre stiamo scrivendo questo articolo la pala è stata rimossa per permettere di esaminare il foro e riprenderne immagini tridimensionali.


Sulla base di queste osservazioni si deciderà se utilizzare ancora la pala per “seppellire” il penetratore con la regolite (una prima stima parla di un apporto di circa 300 cm³ di materiale, ovvero quanto si può ottenere spazzando con la pala, larga 7 cm, una striscia di suolo lunga 40 cm, supponendo che lo strato di sabbia marziana abbia uno spessore di un centimetro), in modo che gli effetti della pressione della pala possano essere più consistenti, o se ritenere sufficiente quella che attualmente può esercitare.
InSight non è solo HP³
Ciò, tuttavia, non avverrà prima di agosto, dal momento che altri team che si occupano della missione InSight reclamano l’impiego del braccio robotico per altri scopi.
Anzitutto comincia a essere urgente l’impiego della camera IDC, montata sul braccio, per monitorare lo stato dei pannelli solari: esaminare lo spessore dello strato di polvere che l’intensa attività atmosferica di Marte vi ha depositato risulta indispensabile per comprendere quanta energia sono ancora in grado di produrre. Tra l’altro, le operazioni compiute con il braccio robotico per il salvataggio della “talpa” risultano piuttosto onerose dal punto di vista dei consumi. Un’accurata conoscenza del budget disponibile sarà importante per capire quanto tempo potrà essere dedicato a tali sforzi, senza compromettere l’operatività degli altri strumenti della sonda.
Altri ricercatori intendono tornare a utilizzare la camera per identificare la caduta di meteoriti nel cielo notturno. Questa attività, condotta con il supporto del sismometro, può consentire di stimare con che frequenza si registrano impatti di meteoriti in questa parte del Pianeta Rosso.
La curiosità giustamente suscitata dalle vicende della “talpa” può, in effetti, rischiare di mettere in ombra le altre rilevanti finalità della missione InSight e i risultati che in esse si stanno ottenendo. Tra questi sono particolarmente significativi quelli del sismometro SEIS (Seismic Experiment for Interior Structure). È interessante notare che anche l’impiego di questo strumento ha messo i ricercatori di fronte a difficoltà impreviste, come sempre accade quando si intraprendono ricerche nuove in ambienti inesplorati. Ad esempio, a dispetto della sua minore densità, l’atmosfera marziana si è rivelata particolarmente turbolenta e “rumorosa”, rendendo particolarmente difficile nelle ore diurne isolare, tra i segnali captati da SEIS, quelli effettivamente collegabili a fenomeni sismici. Un po’ come è successo al penetratore di HP³, anche il Wind and Thermal Shield, la calotta protettiva che doveva isolare il sismometro dal vento e dagli effetti della variazioni di temperatura, si è mostrato non molto efficace rispetto alla funzione per cui era stato concepito. Ciò non ha impedito ai ricercatori di porre le basi di una nuova scienza, la sismologia marziana (che solo in parte è parente dell’analoga scienza terrestre), di trovare risposte alle loro domande e, soprattutto, di porsi nuovi e imprevisti interrogativi. Indipendentemente da quello che sarà il risultato rispetto al funzionamento dello strumento HP³, c’è da credere che gli sforzi del team di Tilman Spohn e di quelli del braccio robotico non saranno senza positive ricadute in termini di conoscenze e di capacità operative acquisite.
![]()
