


Dopo che la Russia ha lanciato il robot umanoide FEDOR verso la ISS, un robot simile della NASA è stato preparato per il ritorno sulla Stazione Spaziale Internazionale dopo essere stato riparato sulla Terra.
Nella presentazione del 1º agosto all’ISS Research and Development Conference, Jonathan Rogers, manager di progetto di Robonaut al Johnson Space Center, ha annunciato che probabilmente il robot tornerà sulla stazione entro la fine di quest’anno su una navetta Cygnus o Dragon.
Nonostante le ultime verifiche sul robot siano in corso e pur trattandosi di un “soggetto prioritario” con altro carico destinato alla ISS, non è ancora stata selezionata alcuna specifica missione per Robonaut.
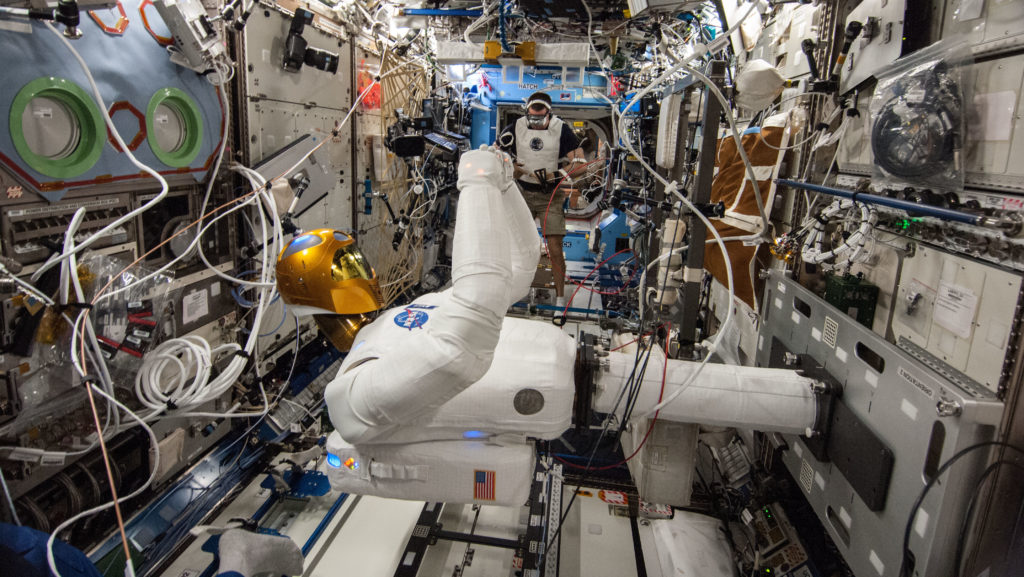
Robonaut 2, come è formalmente conosciuto, ha volato sulla stazione nel 2011, su uno degli ultimi lanci dello Space Shuttle. Il robot ha svolto un serie di test, dimostrando come un umanoide possa lavorare al fianco degli astronauti sulla ISS. Tuttavia, Robonaut 2 ha cominciato ad avere qualche problema nel 2014, poco dopo che gli astronauti aggiunsero un paio di gambe al torso del robot.
«Il nostro processore ha smesso di rispondere poco dopo l’upgrade del software», ha spiegato Rogers. Riavviando il robot, il problema è stato risolto temporaneamente, ma il problema ha continuato a ripresentarsi, «arrivando al punto in cui c’erano processori che non si avviavano affatto».
NASA inizialmente ha tentato di riparare il robot in orbita, con numerosi astronauti che hanno sostituito componenti sospetti con ricambi sulla stazione. Questo lavoro ha individuato il problema in un cavo di alimentazione da 24 volt degradato e mentre si stava valutando di mandare un cavo sostitutivo, la direzione della ISS ha preso la grande decisione di riportare Robonaut a casa per permettere di fare delle riparazioni adeguate.
Il robot è stato portato a terra sulla navetta cargo di SpaceX Dragon CRS-14, ed è arrivato al Johnsons Space Center nel maggio 2018. Una volta nel laboratorio, gli ingegneri hanno scoperto che la radice del problema era un filo di ritorno mancante nell’alimentazione del telaio del computer. Dunque, la corrente usava un “circuito nascosto” che surriscaldava il retro di Robonaut.
Queste sessioni di risoluzione di problemi in orbita ci hanno dato la veloce conferma, una volta portato Robonaut a casa, che sarebbe stato molto difficile ripararlo in orbita.
Jonathan Rogers
Tale difetto era presente già da quando Robonaut 2 fu sviluppato, ma non si è mai manifestato finché le gambe non sono state aggiunte al robot perché è stata richiesta maggiore energia al sistema.
Gli ingegneri hanno revisionato il sistema elettrico di Robonaut e lavorato per identificare altri tre potenziali circuiti nascosti che avrebbero potuto portare problemi al robot. Inoltre, sono stati svolti altri upgrade all’hardware e al software.

Una volta che Robonaut ritornerà sulla ISS, gli ingegneri hanno programmato un intenso piano di controlli che verrà svolto sia dagli astronauti che dai cosmonauti russi, dato che anche Roscosmos ha mostrato interesse nell’essere coinvolta. Dopo tali controlli, verrano condotti inoltre altri esperimenti addizionali grazie al robot.
Noi pensiamo che Robonaut offra una piattaforma unica per il livello di avanzamento tecnologico. Abbiamo già fatto un grande investimento su questo robot.
Jonathan Rogers
Una delle aree di interesse è come il robot potrebbe essere utilizzato sul prossimo avamposto in orbita lunare, il Lunar Orbital Platform – Gateway, il quale ospiterà astronauti solo per brevi periodi di tempo. Un test è già stato programmato per la fine dell’anno prossimo sulla ISS che vedrà Robonaut lavorare insieme ad Astrobee, un altro robot sulla stazione, per allocare e raccogliere specifici carichi.

Una delle cose che stiamo imparando è come influenzare il design del Gateway per permettere di gestire al meglio la stazione attraverso i robot.
Jonathan Rogers
Robonaut, tuttavia, non sarà il primo robot umanoide a visitare la ISS quest’anno. Roscosmos, infatti, pochi giorni fa ha lanciato a bordo della navetta Soyuz MS-14 un robot umanoide di fabbricazione russa conosciuto come Skybot F-850 o FEDOR, che dopo il docking fallito lo scorso 24 agosto, ieri è sbarcato sulla stazione. Tuttavia, molto probabilmente i due umanoidi non si incontreranno, FEDOR ritornerà sulla Terra con la Soyuz MS-14 quando la navetta lascerà la stazione ai primi di settembre.
![]()
