






Il rover cinese inizia l’esplorazione sulla superficie lunare
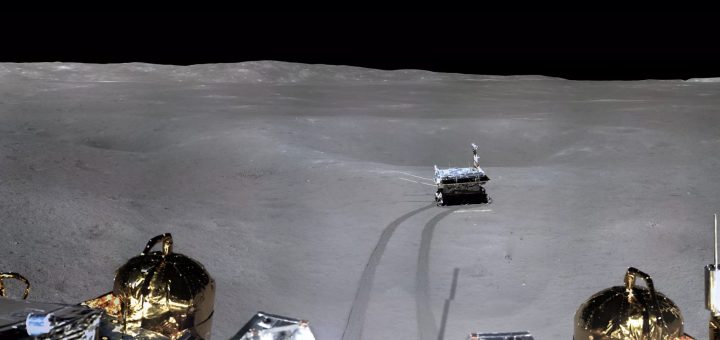
Dopo l’atterraggio perfetto del lander Chang’e 4, avvenuto lo scorso 3 gennaio sul lato nascosto della Luna, il rover a sei ruote Yutu 2 è finalmente sceso dalla sonda madre per iniziare autonomamente l’esplorazione dell’area circostante.
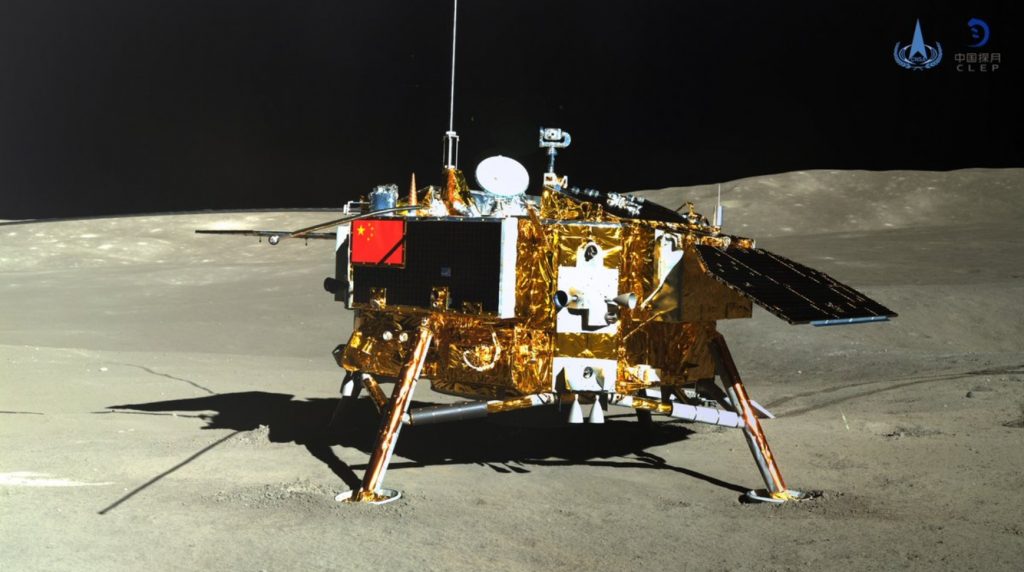
Chang’e 4, del peso di 1200 kg, è atterrata all’interno del cratere Von Karman (largo circa 180 km) nell’emisfero sud del lato nascosto della Luna, diventando quindi il ventesimo lander a posarsi in maniera controllata sulla superficie del nostro satellite ed il primo a farlo sul lato a noi non visibile.
A qualche giorno di distanza sono stati finalmente rilasciati i video ufficiali della fase finale dell’atterraggio e della discesa del rover dalla sonda madre.
La vita operativa prevista del rover è di 180 giorni e l’agenzia spaziale cinese CNSA ha riferito di aver preso tutte le precazioni per evitare quello che nel 2013 successe al rover gemello della missione Chang’e 3, che rimase bloccato (ma attivo) dopo aver percorso solo un centinaio di metri.
Yutu 2 ha una massa di 140 kg, le dimensioni di 1,5 x 1 x 1 m ed è munito di un paio di pannelli fotovoltaici per la produzione dell’energia elettrica. Per affrontare le bassissime temperature delle lunghe notti lunari (pari a 14 giorni terrestri), come il lander Chang’e 4 è provvisto da un’unità di riscaldamento a radioisotopi. Mentre per quanto riguarda la parte scientifica, ospita a bordo i seguenti strumenti:
- Camera Panoramica, installata sulla torretta. Può ruotare di 360° e, grazie alla visione binoculare, è in grado di acquisire anche immagini 3D.
- Radar di penetrazione della superficie, per determinare la stratigrafia del sottosuolo. Ha una capacità di arrivare a circa 30 m di profondità con una risoluzione verticale di 30 cm oppure arrivare a 100 m con risoluzione di 10 m.
- Spettrometro ottico, con range di acquisizione dal visibile al vicino infrarosso.
- Analizzatore ENA (Energetic Neutral Atom), per lo studio dell’interazione del vento solare con la superficie lunare. Fornito dallo Swedish Institute of Space Physics.
Ieri, 13 gennaio, è stato inoltre reso noto che a bordo del lander è stato avviato l’esperimento Lunar Micro Ecosystem, un cilindro metallico, lungo 18 cm e di 16 cm di diametro, del peso di 3 kg, in cui è contenuta una piccola biosfera sigillata. All’interno si trovano microrganismi, uova di insetti e semi di alcune piante, una volta fornita acqua, luce e calore il sistema dovrà provare ad automantenersi ed autoregolarsi in quanto le piante forniranno ossigeno e cibo per gli insetti che a loro volta forniranno anidride carbonica ed eventualmente rifiuti organici. Ogni fase dell’esperimento verrà ripresa da una fotocamera e comparata con un modello gemello di controllo avviato simultaneamente nei laboratori della Chongqing University.

 Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

Bellissimo articolo. Grazie
Grazie per questi dettagli!
Uao! Bellissimi i video! Complimentoni alla Cina per l’impresa!
Nel primo si vede come il lander abbia cambiato direzione più volte prima di atterrare: è stato comandato a distanza o aveva un sistema automatico per identificare il miglior luogo d’atterraggio?
Il lander non era comandato in tempo reale, l’atterraggio è stato gestito dal software e dal sistema di controllo di bordo.
Capito grazie!
P.s: sarebbe bello avere un sistema di notifiche per quando qualcuno risponde al tuo commento, attualmente si rischia di perdersele… (su questo Disquis era infinitamente più comodo)