






Curiosity ritorna a utilizzare il trapano su Marte
I tecnici del JPL della NASA sono riusciti a trovare un modo per aggirare il guasto del trapano del rover Curiosity, divenuto da più di un anno inservibile per le attività scientifiche sulla superficie di Marte.
Il rover della NASA della missione Mars Science Laboratory (MSL), battezzato Curiosity, è giunto sulla superficie marziana il 6 agosto 2012 e da quel momento ha utilizzato per 15 volte il trapano di cui è dotato per ricavare campioni delle rocce di Marte che successivamente sono stati analizzati, in forma di polvere, dagli strumenti SAM (Sample Analysis at Mars – Analisi di campioni su Marte) e CheMin (Chemistry and Mineralogy – Chimica e mineralogia).
A partire da dicembre 2016, tuttavia, una parte del sistema che serve per effettuare la raccolta dei campioni per mezzo del trapano ha smesso di funzionare.
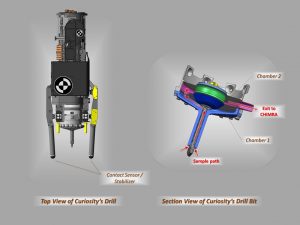
Schema del trapano di Curiosity. (C) NASA/JPL-Caltech
Il trapano di Curiosity si serve di due stabilizzatori simili a dita per puntarsi contro la roccia che viene analizzata, ma un difetto nel motore che controlla la corsa della punta del trapano non le consentiva di estendersi e ritrarsi correttamente fra i due stabilizzatori.
Dopo diversi mesi di tentativi, i tecnici che controllano la missione di Curiosity dal Jet Propulsion Laboratory (JPL) della NASA sono riusciti a fare estendere la punta del trapano oltre gli stabilizzatori anche senza riuscire a risolvere il malfunzionamento del motore.
A questo punto il team della missione MSL si è posto l’obbiettivo di modificare la modalità operativa con cui veniva utilizzato il trapano per raccogliere i campioni di roccia marziana, effettuando la trapanazione senza l’ausilio degli stabilizzatori.
Utilizzando come tester un rover sulla Terra che è la copia quasi esatta del rover Curiosity su Marte, il team di controllo del JPL ha effettuato per diversi mesi dei test per verificare la nuova modalità di utilizzo del trapano, che prevede l’utilizzo dell’intero braccio su cui è montato il trapano per puntarsi contro la superficie da forare.
Mentre la modalità di esecuzione dei fori con il supporto degli stabilizzatori era assimilabile al funzionamento di una trivella, l’uso del trapano sfruttando il braccio per spingere contro la superficie da forare è più simile a come gli esseri umani utilizzano un trapano per i lavori di bricolage casalingo, mantenendo il centraggio sul punto dove effettuare il foro a “mano libera”.
Per fare ciò è stato riprogrammato il software di gestione del sensore si pressione di cui è dotato il supporto del trapano e che originariamente serviva per interrompere l’azione di foratura nel caso in cui veniva percepita una vibrazione improvvisa e troppo violenta che avrebbe messo a rischio lo stesso trapano.
Questo sensore viene adesso usato per evitare che la punta del trapano scivoli lateralmente e quindi corra il rischio di rimanere bloccata in qualche asperità della roccia da analizzare.
Qui di seguito, in un video pubblicato sul canale Youtube del JPL, la spiegazione della nuova modalità di uso del trapano da parte di Curiosity:
Nelle scorse settimane il team del JPL ha inviato a Curiosity la nuova configurazione del software di controllo per riuscire ad eseguire le attività di trapanazione secondo la nuova modalità, che è stata testata con successo il 26 febbraio 2018 eseguendo un foro di circa 1 cm di profondità su una roccia del sito di Lake Orchadie su Marte, dove sta attualmente proseguendo la sua missione il rover della NASA.

Il foro ottenuto dal trapano di Curiosity lo scorso 26 febbraio 2018 usando la nuova tecnica di trapanazione, saggiando una roccia del sito di Lake Orcadie dove attualmente si trova il rover. (C) NASA/JPL-Caltech/MSSS
Una conseguenza della differente modalità di utilizzo del trapano di Curiosity ha implicato che il campione di polvere di roccia ricavato non potesse essere porzionato, filtrato e inviato agli strumenti di analisi per mezzo dell’apposito strumento CHIMRA (Collection and Handling for In-Situ Martian Rock Analysis – raccolta e manipolazione per l’analisi di rocce marziane in-situ ) di cui è dotato il rover.
Il team del JPL ha quindi dovuto inventare un modo per fare arrivare i campioni di roccia agli strumenti SAM e CheMin, facendo cadere la polvere dalla punta del trapano, scuotendola come si fa per il sale da una saliera.
Questa modalità di invio dei campioni di roccia è stata testata con successo sulla Terra, ma poiché le condizioni atmosferiche e di gravità su Marte sono profondamente differenti rispetto al nostro pianeta, non è ancora chiaro se questa tecnica potrà avere successo anche sulla superficie del Pianeta Rosso.
Nei prossimi giorni il team di controllo di Curiosity effettuerà la valutazione dei risultati di questo primo e test e probabilmente procederà ad altri tentativi di trapanazione delle rocce marziane nelle vicinanze del primo foro.
Se il campione di polvere di roccia ricavato sarà sufficiente, verrà effettuato un test di invio del campione agli strumenti di analisi, usando la fotocamera MASTCAM di cui è dotata Curiosity per verificare quanto della polvere sarà effettivamente possibile ricavare dalla punta del trapano.
Fonte: NASA JPL.
 Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
