


Dal Diario di bordo di Samantha Cristoforetti:
Johnson Space Center (Houston, USA), 1 luglio 2014—Ieri abbiamo avuto un’attività di addestramento molto speciale al laboratorio di Realtà Virtuale. Terry, Butch, Anton e io ci siamo uniti per provare una delle complesse coreografie in cui usiamo il braccio robotico in supporto a una passeggiata spaziale.
Nel nostro scenario, Butch e Terry erano inizialmente gli astronauti in passeggiata spaziale, che nel laboratorio di realtà virtuale significa che indossavano gli occhiali e i guanti e si muovevano e interagivano con lo scenario della Stazione Spaziale virtuale.

Con gli occhiali e i guanti nel laboratorio di Realtà Virtuale. Credit: NASA
Io ero l’operatore robotico, e potevo realmente osservare il loro movimento virtuale sulle mie viste delle telecamere. Anton era lì per aiutare principalmente con il movimento panoramico, l’inclinazione e lo zoom delle telecamere, un ruolo che chiamiamo Robotic Workstation Assistant [assistente alla postazione robotica—N.d.T.].
Nel nostro scenario, ci stavamo occupando di un modulo pompa guasto, che era stato già rimosso in una precedente EVA ed era temporaneamente sistemato sul POA—è come l’attuatore all’estremità del braccio robotico, ma si trova in una posizione fissa sulla Stazione. Siamo in grado di installare un perno di presa su un modulo pompa in modo che il POA vi si possa agganciare.
Prima ho ricevuto istruzioni GCA da Butch per manovrare il braccio verso una posizione in cui lui potesse entrare nel fermo per i piedi che, nella nostra simulazione, era già collegato all’attuatore all’estremità del braccio robotico. Date un’occhiata a questa vecchia nota del diario se non sapete cosa significa GCA.
Dopo l’ho manovrato verso il POA. Una volta che Butch si è trovato in posizione per afferrare le maniglie del modulo pompa, abbiamo rilasciato l’unità dal POA e io ho programmato una sequenza automatica per portarla in una piattaforma esterna di fissaggio, la posizione di stivaggio finale dell’unità guasta.
A quel punto ci siamo scambiati i posti: Terry è passato al braccio, tenendo virtualmente il modulo pompa, e io sono diventata EV2, assistendo nel monitorare le tolleranze di movimento e fornendo istruzioni GCA per inserire il modulo pompa nelle rotaie di guida della sua “scatola” di stivaggio.
Il laboratorio di Realtà Virtuale è particolarmente utile per fare pratica di coordinazione e comunicazione, che sono elementi chiave per operazioni combinate EVA/robotiche di successo e senza intoppi. Inoltre, l’ambiente a realtà virtuale fornisce una riproduzione realistica delle condizioni di illuminazione. Di notte, può essere molto impegnativo avere una buona visuale dell’intero braccio robotico e tutti gli spazi di movimento!
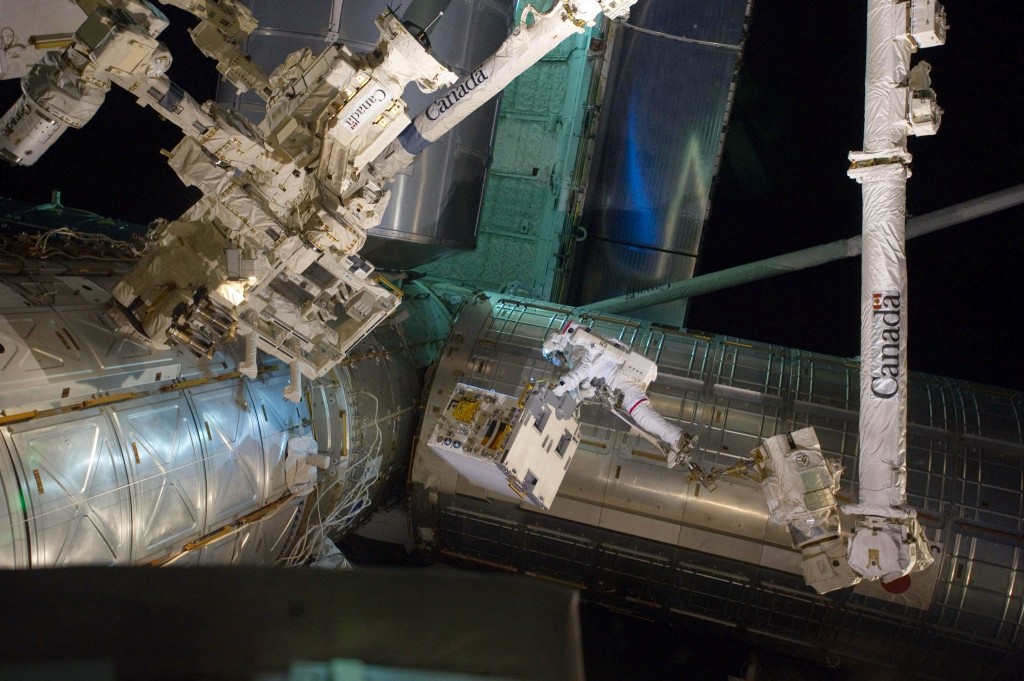
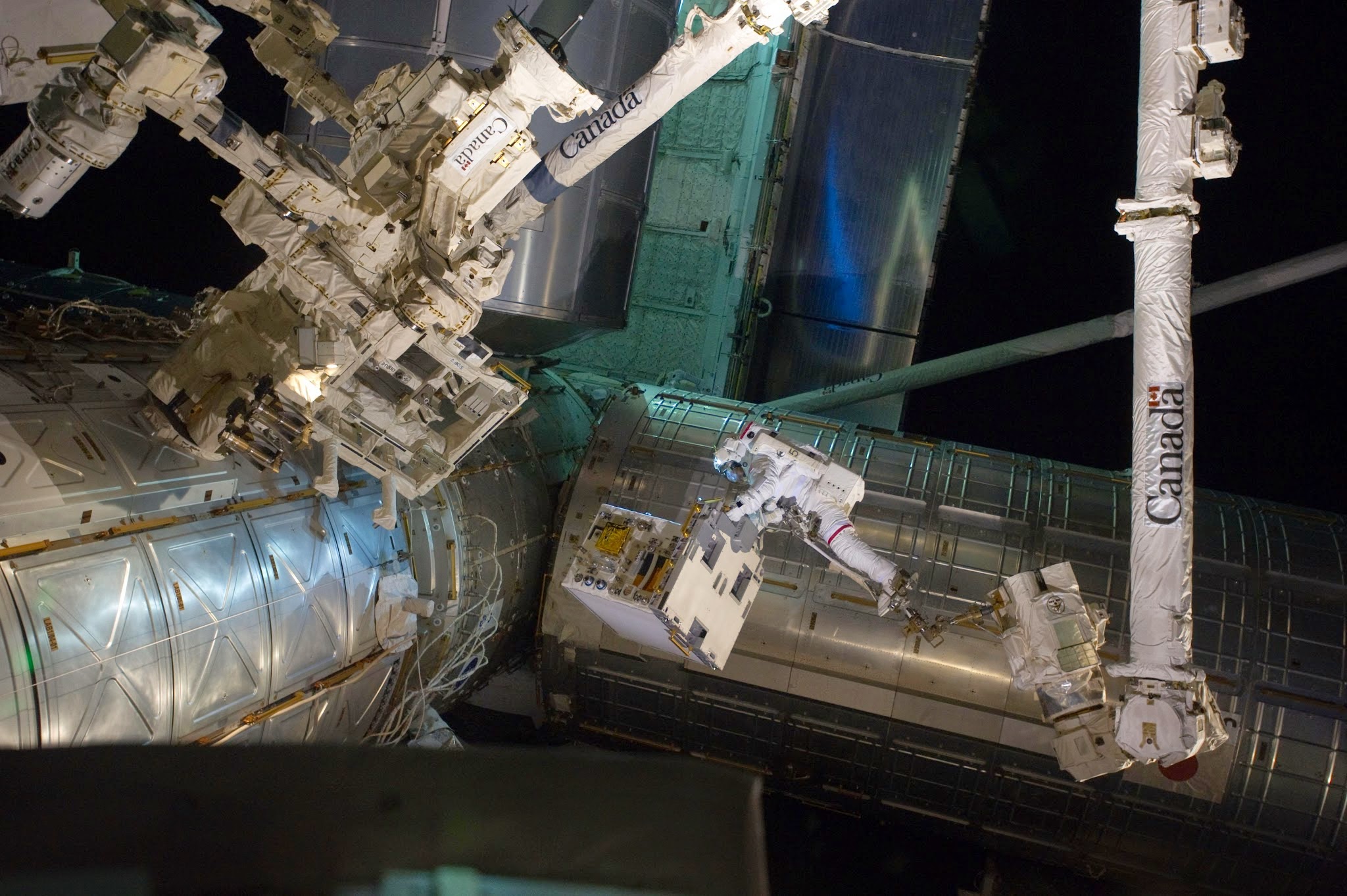
Foto: un membro dell’equipaggio in EVA alcuni anni fa mentre tiene un modulo pompa. Proprio come nel nostro scenario, è agganciato all’estremità del braccio.
Nota originale in inglese, traduzione italiana a cura di Paolo Amoroso—AstronautiNEWS. Leggi il Diario di bordo di Samantha Cristoforetti e l’introduzione.
![]()

{kind=link}