






L-242: Affrontare le emergenze della tuta in una passeggiata spaziale
Dal Diario di bordo di Samantha Cristoforetti:
Johnson Space Center (Houston, USA), 27 marzo 2014—Sono tornata! Mi dispiace veramente per l’interruzione del diario, ma questo paio di ultime settimane sono state realmente molto fitte qui al Johnson Space Center—un programma intenso pieno di molti tipi di eventi: robotica, esperimenti, rassegne dei sistemi, servizi fotografici e riprese TV, simulazioni d’emergenza, scenari di perdite, esami medici, raccolta di dati di base per le ricerche di fisiologia umana a cui parteciperò.
Inoltre, molti corsi di EVA: familiarizzazione con attrezzature ad alta fedeltà, risposta alla malattia da decompressione, risposta alla contaminazione da ammoniaca e un po’ di tempo sott’acqua. Terry e io abbiamo avuto due sessioni in tuta al Neutral Buoyancy Laboratory (laboratorio di galleggiamento neutro). Nella prima abbiamo simulato la sostituzione dell’attuatore all’estremità del braccio robotico, nella seconda abbiamo lavorato al Flex Hose Rotary Coupler (FHRC, accoppiatore rotante del tubo flessibile), un’unità che permette il trasferimento dell’ammoniaca dal traliccio fisso ai radiatori rotanti. L’FHRC è una delle unità più impegnative da sostituire durante una passeggiata spaziale. In realtà, la sostituzione completa richiederebbe probabilmente quattro EVA. Nella piscina abbiamo fatto pratica solo con la EVA numero 3, la rimozione dell’unità di ricambio e la sua installazione, che comprende l’accoppiamento di numerosi impegnativi connettori per i fluidi e l’elettricità all’interno del traliccio. Questa è stata anche la nostra sessione ufficiale di valutazione e siamo passati entrambi!
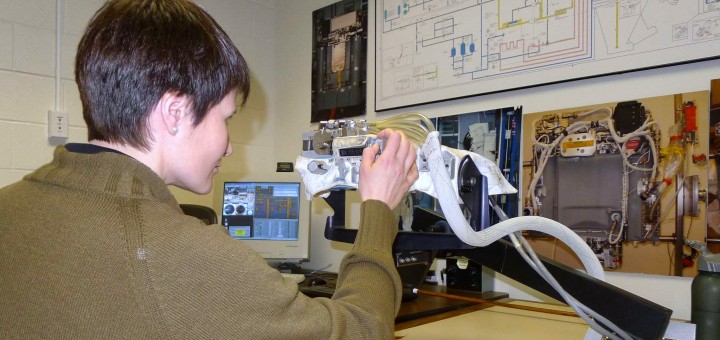
Nella foto potete vedere un corso che ho avuto oggi. È parte di una serie di eventi in cui esaminiamo gli schemi elettrici della tuta EMU e poi seguiamo una serie di scenari di malfunzionamento. L’istruttore può inserire qualsiasi guasto nel simulatore e noi riceviamo i corrispondenti sintomi sul display della Display and Control Unit (DCM, unità di visualizzazione e controllo), che è collegata all’area del petto della tuta reale. Durante una EVA nominale avreste difficilmente necessità di manovrare la DCM una volta all’esterno dell’airlock, ma questo cambierebbe rapidamente se la tuta avesse qualsiasi tipo di avaria, da cui queste opportunità per acquisire realmente familiarità con le risposte ai malfunzionamenti e tutti i display e i controlli sulla DCM.
Nota originale in inglese, traduzione italiana a cura di Paolo Amoroso—AstronautiNEWS. Leggi il Diario di bordo di Samantha Cristoforetti e l’introduzione.
 Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

{kind=link}