


Dal Diario di bordo di Samantha Cristoforetti:
Johnson Space Center (Houston, USA), 13 novembre 2013—Come ho detto nella nota di ieri, ho avuto ieri l’opportunità di provare le operazioni di rendezvous e cattura con i compagni di equipaggio Terry e Butch, probabilmente l’ultima volta che ci troviamo a fare una simulazione in tre persone nella Cupola.
Il lavoro può essere in realtà svolto da due persone, vale a dire un Visiting Vehicle Officer (VV1, ufficiale del veicolo in visita) primario con il supporto di un secondo membro addestrato dell’equipaggio (VV2). I ruoli vengono scambiati al punto di cattura a 10 metri. Il VV2 diventa M1 ed è il primario per la cattura, il che significa che sta effettivamente pilotando il braccio robotico. Il VV1 diventa M2, un ruolo di supporto nelle operazioni di cattura: mentre M1 si concentra sul bersaglio per portare il braccio e l’attuatore nell’inviluppo di presa, M2 ha il controllo delle telecamere, le comunicazioni con la terra e gli aggiornamenti a voce sulla distanza dal perno di presa.
Se c’è un terzo membro addestrato dell’equipaggio a bordo, abbiamo il lusso di avere un VV3: un terzo paio di occhi e qualcuno che può avere specificamente la responsabilità delle nostre cue cards (schede riassuntive) di malfunzionamento.
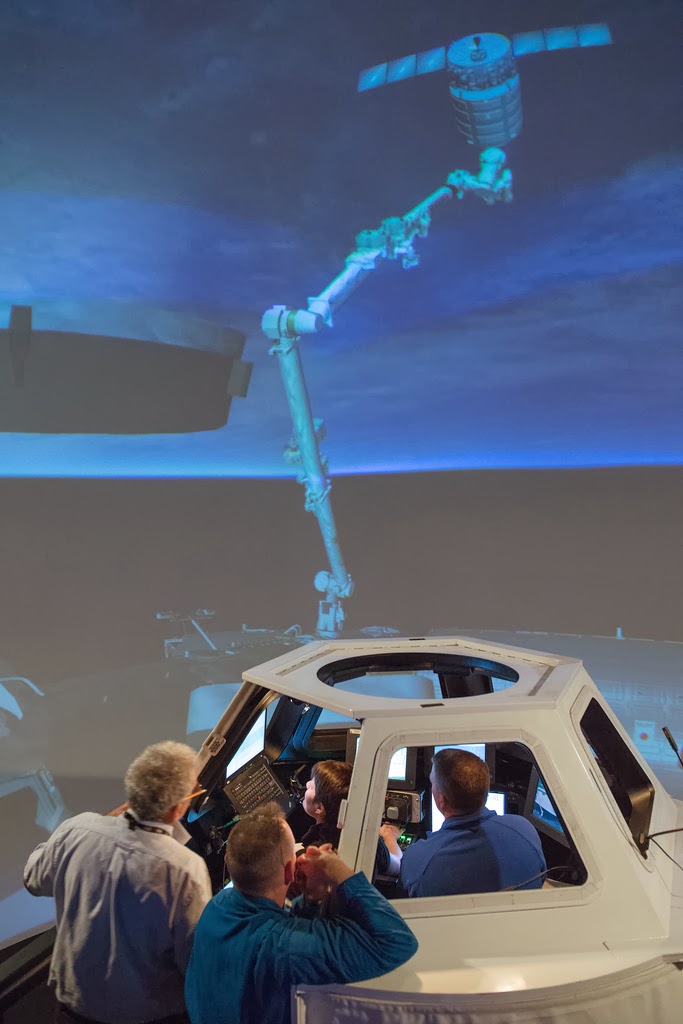
Nella foto allegata potete vedere il nostro Cygnus simulato avvicinarsi al punto di cattura a 10 metri e il Canadarm2 pronto nella posizione iniziale di cattura.
Foto credit: NASA/Harnett
Nota originale in inglese, traduzione italiana a cura di Paolo Amoroso—AstronautiNEWS. Leggi il Diario di bordo di Samantha Cristoforetti e l’introduzione.
![]()
