






HTV-4 in viaggio alla volta della ISS

È decollato ieri sera alle 21:4:46 (CEST) dal Tanegashima Space Center (nel sud del Giappone) il quarto HTV giapponese diretto verso la ISS.
Il cargo, soprannominato “Kounotori” (Cicogna Bianca), ha raggiunto l’orbita quattordici minuti dopo il decollo a bordo del razzo H-IIB, progettato appositamente per questo veicolo.
HTV è dotato di un compartimento pressurizzato (Pressurized Logistics Carrier – PLC) che può ospitare fino a otto rack, dal pensionamento dello Space Shuttle, HTV è al momento l’unico veicolo in grado di trasferire rack sulla ISS.
Sotto al PLC si trova un compartimento non pressurizzato (Unpressurized Logistics Carrier – ULC) dentro al quale si trova uno speciale supporto (Exposed Pallet – EP) sul quale viene montato il carico esterno per la ISS. L’Exposed Pallet verrà prelevato dal braccio robotico della Stazione Dextre e l’hardware verrà quindi installato all’esterno della ISS.
HTV e Dragon sono gli unici veicoli in grado di trasportare sulla ISS materiali ed esperimenti in una zona non pressurizzata.
Al di sotto dell’ULC si trova il comparto dell’avionica e in ultimo quello propulsivo.

I vari compartimenti di HTV.
HTV-4 si trova ora su un’orbita di circa 200×300 km, nel corso dei prossimi sei giorni il veicolo eseguirà una serie di accensioni dei propulsori che gli permetteranno di avvicinarsi sempre più alla ISS ad una quota di circa 410 km. Il rendez-vous con la Stazione Spaziale Internazionale è pianificato per il 9 agosto. HTV, utilizzando una nuova procedura di avvicinamento, si posizionerà circa 30 metri sotto la Stazione, a quel punto sarà compito degli astronauti a bordo della ISS catturare il veicolo con il braccio robotico (SSRMS) e agganciarlo al Common Berthing Mechanism (CBM) Nadir del Nodo 2. Gli hatch verranno aperto nei giorni successivi e potranno così iniziare le operazioni di scarico, che dureranno qualche settimana. Nel frattempo il cargo verrà anche riempito con rifiuti e materiale obsoleto.
Il 5 settembre HTV-4 verrà sganciato dalla ISS e rilasciato. Il rientro distruttivo in atmosfera è programmato per il 7 settembre sopra il sud dell’Oceano pacifico. Per La prima volta HTV, durante il rientro in atmosfera, avrà con sé anche un payload esterno della Stazione che non è più utilizzato.
Nelle scorse settimane l’equipaggio ha configurato e preparato tutta la strumentazione necessaria per l’arrivo di HTV, in particolare sono state eseguite alcune calibrazioni della Robotic Work Station (RWS) all’interno di Cupola. Questi test, in particolare il Capture Volume Checkout, costituiscono un Launch Commit Criteria (LCC), se non vanno a buon fine HTV non può essere lanciato.
Il payload pressurizzato di questo volo di HTV è costituito da otto HTV Resupply Racks (HRRs), infatti nessuno di essi verrà trasferito all’interno della ISS. Questi sono carichi di cibo, acqua, oggetti di igiene personale, vestiti puliti, parti di ricambio, oggetti personali dell’equipaggio ed esperimenti scientifici.
Kirobo è alto circa 34 centimetri, molto più piccolo di Robonaut.Tra il carico pressurizzato spicca un piccolo robot umanoide chiamato Kirobo (Kibo Robot Project) in grado di interagire con l’equipaggio tramite comandi vocali. Kirobo rimarrà sulla ISS fino a dicembre 2014 proprio per testare le interazioni vocali uomo-robot, dopodiché verrà riportato a Terra.
Nella sezione pressurizzata trova posto inoltre un nuova task board per il payload esterno Robotic Refuelling Mission (RRM) che permetterà di iniziare la seconda fase delle sperimentazioni focalizzata sul rifornimento di fluidi criogenici per gli strumenti di un satellite. La Task Board 3 (TB3) verrà trasferita fuori dalla ISS utilizzando l’airlock giapponese del modulo Kibo e poi il braccio robotico Dextre.
Un altro carico pressurizzato degno di nota è il pacchetto “Ham TV” che fornirà all’equipaggio la capacità inviare a Terra video tramite la Stazione Ham Radio della ISS, all’interno di Columbus. Questo pacchetto permetterà alle organizzazioni che conducono contatti radioamatoriali con gli astronauti a bordo della ISS (principalmente attività didattiche nelle scuole) di avere un contatto visivo con gli astronauti oltre a quello audio.
Con HTV sono stati lanciati anche quattro cubesat, che verranno rilasciati dalla ISS usando il JEM-Small Satellite Orbital Deployer (J-SSOD). I satelliti sono “Pico Dragon”, costruito dal Giappone in collaborazione con il Vietnam, per testare alcune tecniche di ripresa della Terra; “Ardusat-1” e “Ardusat-X”, costruiti da Nanoracks e Nanosatisfi, testeranno alcune piattaforme riprogrammabili in orbita; da ultimo il cubesat triplo (3U) “TechEdSat-3”, costruito dal centro di ricerca NASA Ames, testerà un nuovo sistema frenante e di deorbita chiamato Exo-brake.
A bordo di HTV trova posto anche una telecamera 4K (di fattura giapponese) che verrà usata per filmare la Cometa ISON in Dicembre. La telecamera sarà una delle migliori a bordo della ISS ed è stata modificata appositamente: oltre alla ottima risoluzione avrà una sensibilità fino a otto volte superiore rispetto alle telecamere attualmente a bordo.
Altre apparecchiature inviate sulla ISS includono un nuovo freezer giapponese, chiamato Freezer-Refrigerator of Stirling Cycle (FROST), e uno speciale strumento, ISS Cryogenic Experiment storage Box (ICE Box), in grado di mantenere campioni di esperimenti a basse temperature senza l’alimentazione elettrica.
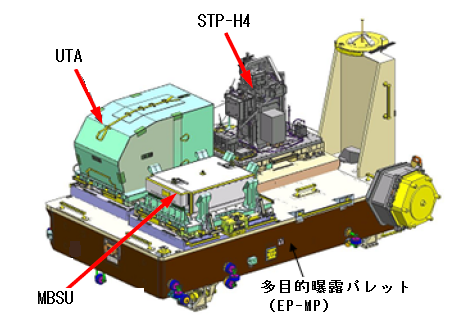
HTV-4 Unpressurized Logistics Carrier (ULC).
Il carico esterno è costituito invece da due Orbital Replacement Units (ORUs) e un nuovo esperimento esterno per la ISS.
Una delle ORU è una Main Bus Switching Unit (MBSU), componente dell’Electrical Power System (EPS) della ISS. Le quattro MBSU a bordo della ISS gestiscono i carichi del sistema di alimentazione elettrico della ISS gestendo le linee che arrivano dagli otto pannelli solari. Sulla ISS è già presente una MBSU di riserva, tuttavia trattandosi di componenti particolarmente importanti è stato deciso di inviare una nuova aggiuntiva. Una MBSU è stata rimossa e sostituita proprio lo scorso anno in seguito ad un guasto.
La seconda ORU è l’Utility Transfer Assembly (UTA), anch’esso un componente dell’EPS della Stazione utilizzato per trasferire la corrente elettrica dai giunti rotanti dei pannelli solari Solar Alpha Rotary Joint (SARJ) al resto della Stazione.
Sulla ISS sono le UTA operative, una sul Port SARJ e una sullo Starboard SARJ; è presente un solo ricambio al momento, ma siccome in caso di guasto di una di queste unità la ISS potrebbe perdere fino al 50% dell’energia elettrica è immediata la necessità di averne a bordo almeno due.
Per quanto riguarda l’ultimo payload esterno si tratta di Space Test Program-Houston 4 (STP-H4), realizzato dal Naval Research Laboratory (NRL) in collaborazione con il Department of Defence Space Test Program (DoD STP), comprende otto esperimenti focalizzati sull’osservazione dell’atmosfera, controllo termico, misura delle radiazioni, elaborazione dati e osservazione dei fulmini sulla Terra.
Il compito di installare i vari payload esterni nelle proprie posizioni all’esterno della Stazione spetterà al braccio robotico Dextre.
La MBSU verrà posizionata sull’ExPrESS Logistics Carrier-2 (ELC-2), UTA su ELC-4 mentre STP-H4 su ELC-1. Ultimate le installazioni dei nuovi payload Dextre rimuoverà STSP-H3 da ELC-3 e lo posizionerà nel comparto non pressurizzato di HTV per la distruzione durante il rientro atmosferico. STP-H3 era stato lanciato a bordo di STS-134 nel maggio 2011.
Altri dettagli sul payload sono disponibili qui: http://iss.jaxa.jp/en/htv/mission/htv-4/payload
Qui è possibile scaricare il press-kit della missione: http://iss.jaxa.jp/en/htv/mission/htv-4/presskit/htv4_presskit_a.pdf
Fonte: NSF.
 Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2025, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
