






Controllo remoto, il futuro dell’esplorazione

L’esplorazione dello spazio ma anche la ricerca spaziale potrebbero aver visto un primo esempio dei loro futuri sviluppi nell’esperimento che Chris Cassidy (astronauta NASA attualmente sulla ISS) ha compiuto lunedì 17 giugno: l’astronauta infatti per la prima volta ha controllato in maniera remota ed in tempo reale dall’orbita un “rover/robot” sulla superficie di un pianeta, in questo caso la Terra.
L’esperimento si è svolto con la supervisione e la collaborazione della University of Colorado, mentre il robot da controllare si trovava presso il sito di test di suolo lunare dell’ Ames Research Center della NASA in Califonria ed il task da portare a termine era il dispiegamento di un’antenna in pellicola che è attualmente in corso di sviluppo proprio da parte della University of Colorado Boulder.
L’esperimento è stato supervisionato e coordinato dal Lunar University Network for Astrophysics Research (LUNAR – http://lunar.colorado.edu) della University of Colorado Boulder che svolge diverse attività in collaborazione con NASA ed altre istituzioni (varie università USA ma anche ESA ed alcune realtà industriali) sempre nell’ambito della ricerca lunare.
Logo di LUNAR (Credit University of Colorado Boulder)
In particolare, il direttore del LUNAR, Jack Burns, da lungo tempo propone di realizzare un radio telescopio da posizionare sul lato nascosto della Luna per poter ascoltare i “lievi sussurri” dalle regioni distanti dello spazio che ci possono svelare i segreti dei primi momenti di vita dell’universo quando sono nate le prime galassie e stelle. Nelle parole di Burns questa è una cosa che non si può fare con altre tecnologie o tecniche e solo un telescopio di questo tipo ci può permettere di puntare verso questo genere di ricerca così fondamentale.
Il vantaggio di avere un radio telescopio sul quel lato della Luna sono innegabili visto che sarebbe schermato dall’inquinamento radio proveniente dalla Terra ed anche dalle distorsioni con cui la ionosfera terrestre inquina i segnali provenienti dallo spazio.
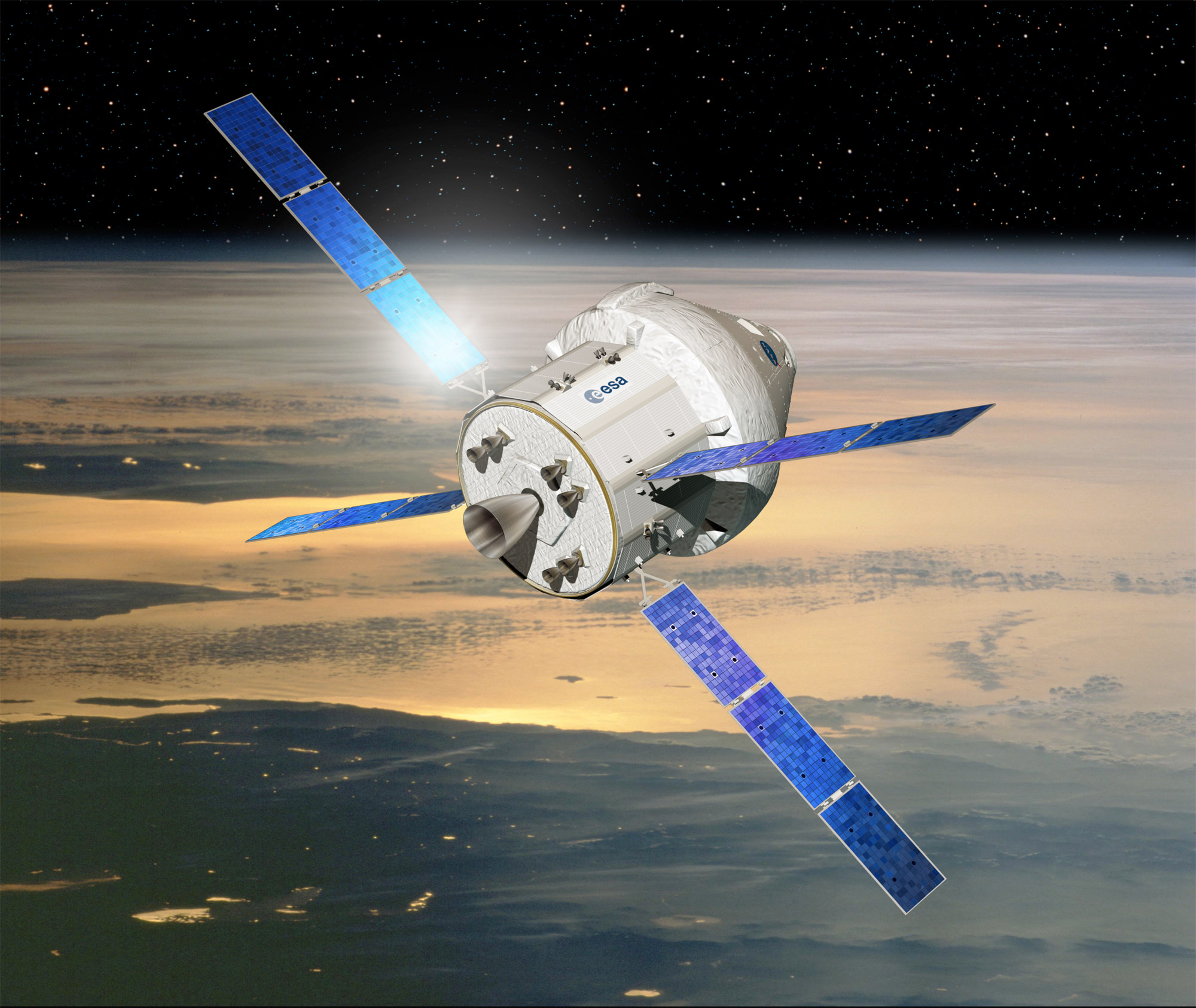
La capsula Orion con la sua possibilità di viaggio e soggiorno nello spazio profondo permetterà di lavorare sul lato nascosto della Luna
Ed è per questo che il LUNAR si è interessato al controllo remoto ed ha stretto una collaborazione con il progetto della NASA Human Exploration Telerobotics che studia e cerca di sviluppare appunto la tecnologia necessaria al controllo di robot sulla superficie dall’orbita. Infatti l’idea del team è di sfruttare la nuova capsula Orion che finalmente permetterà a degli astronauti di spingersi nello spazio profondo ed in particolare a circa 60.000 km dalla superficie della Luna in un punto detto L2 o Punto di Lagrange 2 del sistema Terra-Luna: in questo punto, detto semplicemente, le forze di gravità esercitate da Terra e Luna si annullano ed una astronave può agevolmente mantenere un orbita stazionaria (per maggiori dettagli si può consultare Wikipedia alla relativa voce http://it.wikipedia.org/wiki/Punto_di_Lagrange). Da questa posizione così stabile, nei progetti di Burns e colleghi un astronauta dovrebbe controllare un rover depositato sulla superficie della Luna e fargli dispiegare una pellicola di Kapton contenente le radio antenne.
Il Kapton è una pellicola poliimmide che rimane stabile e mantiene le proprie proprietà fisiche in un grande range di temperature e infatti tale materiale viene già utilizzato sulle tute spaziali, nei circuiti stampati flessibili e in molti ambiti aerospaziali (era utilizzato anche come isolante sui cavi dello Space Shuttle). Altre caratteristiche interessante sono la sua trasparenza ai raggi x e la resistenza all’irraggiamento, tutte queste caratteristiche lo rendono il materiale ideale per la realizzazione delle antenne di un radio telescopio posizionato in un ambiente così esposto all’escursione termica e alle radiazioni come la superficie del lato nascosto della Luna.
Nel test di giugno, che è il primo di 3 programmati, Cassisy ha “pilotato” un robot K10 per ben 3 ore su un’area che si estende per l’equivalente di 2 campi da football. Si tratta di un rover con 4 ruote motrici che pesa circa 100 Kg e può muoversi ad una velocità di circa 90 cm al secondo e per l’occasione era equipaggiato con diverse videocamere e uno scanner 3d laser oltre ovviamente al meccanismo per il dispiegamento della pellicola.

Il rover K10 nel Roverscape in California mentre distende la pellicola simulante la radio antenna. (Credit: Jack Burns)
Oltre a servire come test per il dispiegamento dell’antenna, questo test rientra in un’ottica più ampia di controllo remoto come spiega Terry Fong, direttore del gruppo NASA Intelligent Robotics, secondo il quale in futuro l’esplorazione spaziale incontrerà dei compiti non fattibili maualmente dall’uomo e solo i robot potranno integrare gli esploratori umani consentendo agli astronauti di completare tali compiti in remoto da stazioni spaziali, astronavi o altri tipi di habitat.
La speranza di Burns invece è che questo test coronato da successo porti ad un’accelerazione del progetto di telescopio sul lato nascosto della Luna anche perchè nella sua visione si tratta di un posto inesplorato che si trova giusto nel resto della casa, a solo 3 giorni di viaggio.
Fonte: http://www.parabolicarc.com/2013/07/03/iss-astronaut-remotely-controls-rover-on-earth-in-preparation-for-lunar-exploration/
 Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
