


Un nuovo ed importante traguardo è stato conquistato recentemente nella storia dell’esplorazione spaziale.
L’atteso prototipo denominato Robotic Refueling Mission (RRM), nato da uno sforzo congiunto tra la NASA e l’Agenzia Spaziale canadese, ha iniziato ad operare sulla Stazione Spaziale Internazionale.
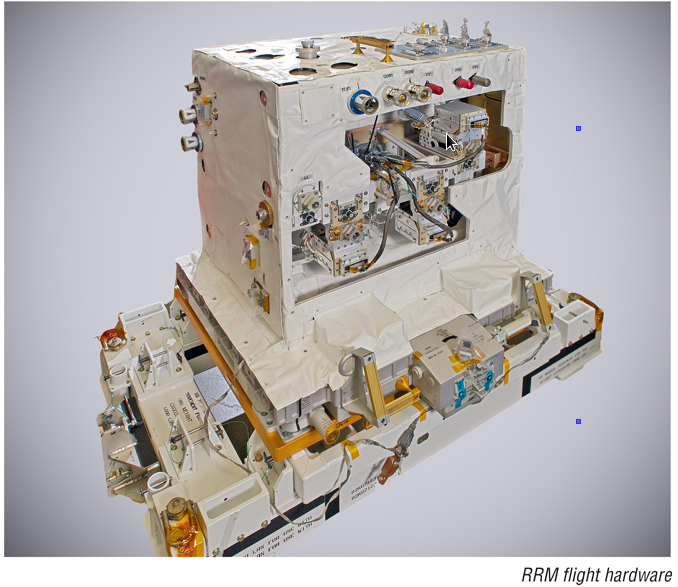
Portato sulla ISS dalla spedizione Shuttle STS-135, RRM è un dimostratore di tecnologia che dovrà indicare gli strumenti e le tecnologie necessarie per rendere possibile manutenere e rifornire roboticamente satelliti in orbita, in particolare quelli che in origine non erano stati progettati e costruiti per esserlo.
RRM è sostanzialmente un set di 4 tools che, in collaborazione con il braccio robotico Dextre, abiliteranno un operatore remoto a tagliare e sfilare la protezione termica, svitare le coperture, accedere alle valvole di rifornimento e trasferire il combustibile, dimostrando così la fattibilità del progetto.
Ogni strumento è dotato di 2 telecamere per dare la possibilità agli operatori di tenere costantemente sotto controllo sia l’operazione in corso che lo strumento utilizzato.
Tutte le operazioni RRM saranno controllate a distanza dagli operatori degli Space Center statunitensi e dal Centro di Controllo dell’Agenzia Spaziale Canadese di St. Hubert nel Quebec.
Questo studio di fattibilità è una primizia anche per il braccio robotico Dextre, poichè questa è la priuma volta che viene utilizzato non solo per compiti di supporto.
Attingendo a 20 anni di esperienza nella manutenzione del telescopio Hubble, SSCO ha aviato nel 2009 lo sviluppo di RRM i cui risultati finora ottenuti verranno illustrati nel Workshop Internazionale sul On-Orbit Servicing satellitare previsto per il prossimo 30 e 31 maggio 2012 presso il Goddard Space Flight Center.
Fonte: Goddard Space Flight Center
![]()
