


Il manipolatore robotico Dextre, installato sulla stazione spaziale internazionale dal 2008, verrà utilizzato dal prossimo autunno per sperimentare tecniche di rifornimento satelliti nello spazio.
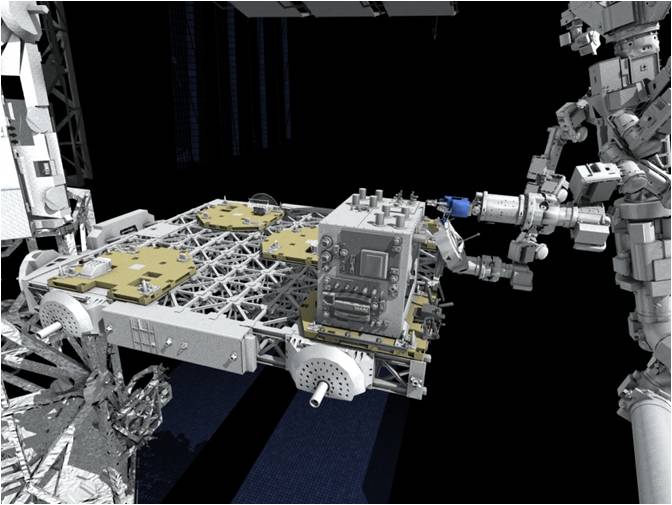
L’esperimento Robotic Refuelling Mission (RRM) verrà portato sulla ISS il mese prossimo con il lancio di STS-135 Atlantis ed installato su ELC-4. Esso prevede una struttura che comprende diversi elementi e dispositivi per simulare un intervento di rifornimento ad un satellite.
Nel periodo successivo all’installazione RRM verrà utilizzato in diverse prove che prevedono l’utilizzo del braccio robotico della ISS e di Dextre per eseguire operazioni di precisione comandate in remoto da Houston. Tali operazioni, che simuleranno un rifornimento in volo di un satellite, serviranno per validare il sistema in un ambiente controllato e a basso rischio come quello della ISS.
L’eventuale successo della missione potrà essere utilizzato come base per futuri esperimenti di rifornimento in volo di veri e propri satelliti. Sia Dextre che il braccio robotico della ISS sono stati progettati e costruiti per NASA e CSA dalla compagnia canadese MDA. Proprio MDA ha annunciato lo scorso marzo l’intenzione di mettere in orbita nel 2015 una stazione orbitante di rifornimento, denominata Space Insfrastructure Servicing (SIS), che sfrutterà proprio un braccio robotico per compiere operazioni di rifornimento in volo. Secondo l’azienda canadese, i principali clienti dalla SIS saranno i satelliti per telecomunicazioni di Intelsat, la quale avrebbe firmato con MDA un accordo del valore di 280 milioni di dollari.
Dextre, il cui nome per esteso è Special Purpose Dexterous Manipulator, è stato portato sulla ISS nel marzo 2008 dallo space shuttle Endeavour, durante la missione STS-123, ma soltanto nel febbraio 2011 è stato utilizzato per la prima volta, compiendo operazioni di scarico dall’esterno della navetta cargo giapponese HTV Kounotori-2.
Fonti: NASA, MDA
![]()
