






Robot a terra teleguidati dall’ISS
Meteron (Multi-purpose End-To-End Robotic Operations Network) è un programma di esperimenti ESA che mira a fornire le basi per realizzare una completa struttura di teleguida di elementi robotici, da impiegarsi nell’esplorazione lunare, marziana e di altri corpi celesti. L’iniziativa è nata in risposta ai numerosi suggerimenti pervenuti ad ESA, che aveva richiesto proposte su nuovi modi di impiegare la stazione spaziale come banco di prova per missioni esplorative. Molte delle proposte riguardavano, appunto, il controllo di robots a terra a partire da una postazione in orbita.
Uno dei vantaggi di Meteron è che consente di realizzare velocemente gli esperimenti, sfruttando infrastrutture e tecnologie già esistenti e riducendo i costi.
Il primo test previsto è la guida di Eurobot (un rover prototipo ESA montato su 4 ruote e con due bracci meccanici) impiegando un computer speciale installato sull’ISS e dotato di schermi particolari e joystick.
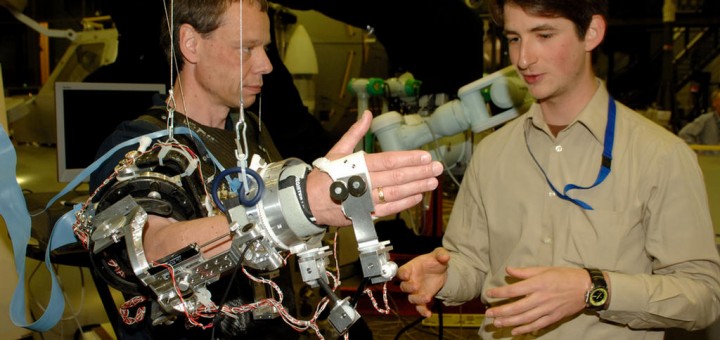
Il passo successivo, entro due/tre anni, sarà il controllo di Justin, un robot antropoide che ha la peculiarità di poter replicare il senso umano del tatto, grazie ad appositi sensori. Il robot verrà mosso dall’astronauta sull’ISS indossando un esoscheletro sul braccio. L’apparato restituirà all’operatore le medesime stimolazioni tattili percepite dal robot a terra, realizzando un feedback che consentirà maggior precisione e duttilità nei movimenti.
La realizzazione di questa interfaccia uomo-macchina è piuttosto complessa, e richiede di integrare una solida architettura di comunicazione, un sistema operativo ed un protocollo per permettere ad astronauti, robots e centro di controllo di cooperare al meglio. Pare comunque certo che una buona parte delle future attività di esplorazione spaziale verrà condotta con questi nascenti sistemi di guida remota.
Fonte: ESA
 Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
