






Kounotori3 in viaggio verso la ISS
È decollato ieri ed è ora in viaggio, il terzo esemplare del sistema automatico di rifornimento cargo Giapponese alla ISS.
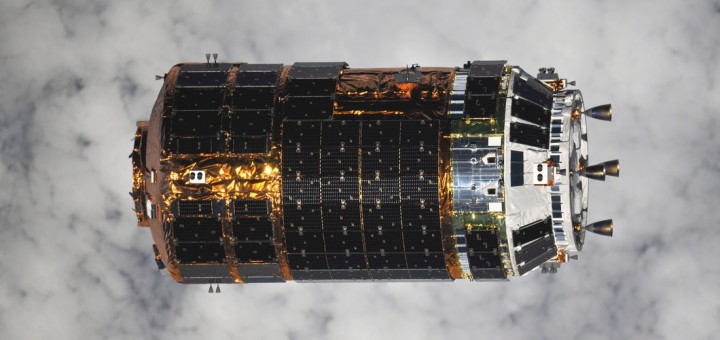
L’agenzia spaziale Giapponese JAXA ha lanciato dal Tanegashima Space Center, con il consueto H-IIB, Kounotori3, questo il nome del cargo nipponico.
Il lanciatore giapponese H-IIB è un vettore bistadio a propellenti criogenici coadiuvato da quattro booster a propellente solido per le prime fasi di lancio. Dopo l’immissione in orbita dell’HTV, è stata testata una nuova procedura per il rientro distruttivo controllato dell’ultimo stadio del lanciatore. Lo stadio è stato fatto rientrare, effettuando il rallentamento necessario alla manovra, azionando il propulsore utilizzato al lancio al minimo della potenza disponibile e senza l’accensione delle turbopompe, allo scopo di controllare con precisione il punto di impatto nell’Oceano Pacifico.
A seguito del lancio, HTV-3 manterrà l’orbita rifinendola nei prossimi giorni e per circa una settimana verranno effettuati i test necessari a validare i sistemi di avvicinamento alla ISS.
L’aggancio con il braccio robotico della ISS SSRMS avverrà il prossimo 27 Luglio e a seguito del docking con il Nodo 2, l’equipaggio procederà con le operazioni di carico e scarico del cargo robotico, riempito come di consueto con vestiti, cibo e rifornimenti vari nella parte pressurizzata.
Per quanto riguarda la sezione esterna, non pressurizzata, sempre il braccio robotico della ISS, installerà sul laboratorio Giapponese Kibo l’Exposed Pallet (EP) che contiene una serie di esperimenti da svolgere nella parte esterna del laboratorio.
Fra gli esperimenti a bordo di Kounotori3 è presente ISERV (International Space Station SERVIR Environmental Research and Visualization System), un sistema di osservazione ottico della Terra dedicato allo studio dei disastri naturali e dell’ambiente.
ISERV verrà installato sul Window Observational Research Facility (WORF), l’oblò rivolto verso la Terra in Destiny ed è realizzato partendo da un telescopio commerciale catadiottrico controllato in remoto con un software dedicato agli scopi della missione.
 Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Ove non diversamente indicato, questo articolo è © 2006-2025 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
